
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Assembly Performance Metrics and Test Methods
Summary
New technologies in the areas of robotic arms and end-effectors have the potential to accelerate the use of robotics for assembly. The force sensing and compliance capabilities used in collaborative robots to prevent injuries and enable them work safely alongside human workers in manufacturing environments lend themselves to robotic assembly tasks. Additionally, robotic hands are emerging as a next generation end-effector technology with advanced force control and manipulation capabilities. These new technologies as well as their simplified programming interfaces and reconfigurability promise new ways of tackling the small parts assembly field especially for low-volume, high-mix manufacturing operations. A set of performance metrics, test methods and associated artifacts are being developed to progress the application of these technologies and can also be used to evaluate existing robotic assembly technologies.
Description
Performance benchmarks are being built as a modular set of task-based tests. These reconfigurable tests incorporate small part insertions and fastening methods such as threading, snap fits, and gear meshing using standard components including screws, nuts, washers, gears and electrical connectors. The test methods leverage factors identified by Boothroyd-Dewhurst (B-D) design for assembly (DFA) studies. These studies have already identified and tabulated various important factors based on manual human performance in an assembly task. For instance, size and symmetry of parts, tool usage, fixturing, mechanical resistance, mechanical fastening processes, visual occlusion, and physical obstruction are all influential towards time-based human performance. Designing benchmarking tasks that efficiently sample this design space will greatly aid the assessment of a robotic system and quickly identify its strengths and weaknesses.
Another important aspect of performance measurement is providing confidence in the measured results. Consequently, multiple repetitions of a task are required to generate enough data for benchmarking comparisons. Moreover, the use of various statistical tests including test for correlation, distribution, variance, and mean will help identify significant comparative differences in performance data. Conducting these tests would also help reduce the number of false claims that may be issued regarding a robot’s level of performance.
The development of assembly-relevant metrics and tests is part of a NIST-led effort sponsored by ASTM committee F45.05 on Grasping and Manipulation with the goal of identifying key competencies and characteristics of robotic systems using a robust set of formalized evaluations and benchmarks. Ultimately, these benchmarks can help to match robotic hand capabilities to end-user needs as well as to help provide developers and researchers insight for improving their hardware and software designs.
Current Assembly Test Designs
NIST prototype Assembly Task Boards (ATB) are outlined below. Although shown in vertical orientations, the task boards can be placed horizontally or in other orientations that are representative of specific assembly requirements. Procedures for conducting the tests and capturing performance data can be found in the protocol template.
Task Board #1 Competencies: peg insertions, gear meshing, electrical connector insertions, nut threading 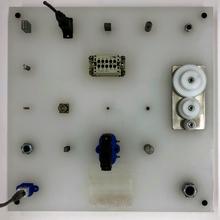
| Description This task board is designed to quantify a robot system’s capability for performing peg insertions, gear meshing, electrical connector insertions, and nut threading. Design factors include size, shape, location, and type of parts. Replication Instructions for reproducing the task board can be downloaded here. Design files for laser cut board can be downloaded here. STL files for 3D printing connector housings can be downloaded here. CAD models for all components can be downloaded here. STL models for all components can be downloaded here. Kit tray for all components can be downloaded here. Generalized test metrics, methods, and data analysis recommendations can be downloaded here. Adoption A similar task board was used during the IROS 2017 Robotic Grasping and Manipulation Competition. The details of the competition can be found here. NTB1 can now be purchased from the University of Massachusetts at Lowell, New England Robotics Validation and Experimentation (NERVE) Center: |

Task Board #2 Competencies: alignment and insertion of collars and pulleys, handling flexible parts, meshing/threading belts, actuating tensioners, and threading bolts.
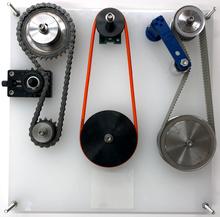
| Description This task board is designed to quantify a robot system’s capability for performing alignment and insertion of collars and pulleys, handling flexible parts, meshing/threading belts, actuating tensioners, and threading bolts. Design factor: type of parts - based on commercial use and difficulty of task. Replication Instructions for reproducing the task board can be downloaded here. Design files for laser cut board can be downloaded here. CAD models for all components can be downloaded here. Kit tray for all components can be downloaded here. STL models for all components can be downloaded here. Adoption A similar task board was used during the World Robot Summit WRC: challenge 2018 The details of this competition can be found here. |
Task Board #3 Competencies: tracking, placement, weaving and manipulation of loose cables, handling flexible parts, and inserting ends into various connectors.
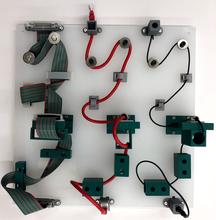
| Description This task board is designed to quantify a robot system’s capability for performing tracking, placement, and weaving loose parts that require advanced manipulation in the form of hand-off and/or release and re-acquiring cables. Design factors include thickness, shape, and stiffness of cables as well as location and spacing of obstacles. Replication Instructions for reproducing the task board can be downloaded here. Design files for laser cut board can be downloaded here. CAD models for all components can be downloaded here. STL models for all components can be downloaded here. Adoption This task board as well as all previous ones were used as inspiration for a combination task for the Manufacturing Track of IROS 2020. The details of this competition can be found here. |
Task Board #4 Competencies: Placement, weaving and 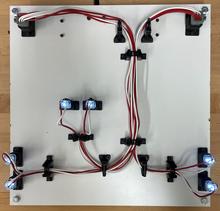
| Description This task board is designed to quantify a robot system’s capability to make a wire harness by routing and grouping wires according to a diagram then removing the completed harness from the board. Replication Instructions for reproducing the task board can be downloaded here. Design files for laser cut board can be downloaded here. CAD models for all components can be downloaded here. STL models for all components can be downloaded here. Adoption This task board as well as all previous ones were used as inspiration for a combination task for the Manufacturing Track of ICRA 2022. Details for the competition can be found here. |
Related Work
The NIST-Manufacturing Objects for Assembly Database (MOAD) ATB dataset provides high resolution RGB images, colored point clouds, and metadata related to the objects and environment of each part included in ATB 1 as well as the full assembly. Additional data will be provided which includes, segmentation masks for images, texture mapped 3D mesh models, and the script for easily downloading and processing the data. This resource also includes information for users to replicate the data capture system, opensource code and custom CAD files. It will soon be expanded to include all ATB and other manufacturing objects.
Impact of Robotic Hand on Pick-and-Place Performance
Comparative Peg-in-Hole Testing of Robotic Hand and Gripper
For performance benchmarking and test replication, please download the generated robot performance data and artifact CAD models:
Peg Hole Performance Data (zip file)
Peg Hole CAD (zip file)