
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
RoboCupRescue League: 2003 Events
|
|

|
|
RoboCup2003 U.S. Open - Rescue Robot League
| Location: | Pittsburgh, PA, USA |
| Dates: | April 30 - May 4, 2003 |
A new orange arena (see Figure 1) was fabricated at Carnegie Mellon University and used to host demonstrations for the first RoboCupRescue U.S. Open (formerly known as the American Open).



Figure 1: RoboCup2003 U.S. Open – Rescue Robot League Orange Arena
Demonstration Teams:
ENTROPY 1.0 - UNIVERSITY of NEW ORLEANS (USA)
RCLUB – CARNEGIE MELLON UNIVERSITY (USA)
TEAM CORKY – CARNEGIE MELLON UNIVERSITY (USA)
TEAM SNOOPY – CARNEGIE MELLON UNIVERSITY (USA)




Figure 2: Pictures of some of the RoboCup2003 U.S. Open – Rescue Robot League Participants
Following the demonstrations, this Orange Arena was setup in its permanent home at Carnegie Mellon University to support further research and testing.
RoboCup2003 - Rescue Robot League Competition
| Location: | Padua, Italy |
| Dates: | July 1-12, 2003 |
For the RoboCup2003 – Rescue Robot League Competition, new Italian arenas were fabricated for this international event in Padua, Italy (Figures 3a-3d).

Figure 3a: RoboCup2003 – Rescue Robot League Arenas (Yellow, Orange, Red)

Figure 3b: Pictures of the RoboCup2003 Yellow Arena

Figure 3c: Pictures of the RoboCup2003 Orange Arena

Figure 3d: Pictures of the RoboCup2003 Red Arena
The RoboCup2003 – Rescue Robot League featured twelve teams from eight countries who developed unique platforms with very diverse characteristics. Prior to the competition, each team completed a coversheet that provided a brief overview of their systems' capabilities (see below).
CoverSheets
Each team competed in the preliminary round (3 missions) with the top six teams (best two out of three preliminary mission scores) moving on to the semi-final round (2 missions). The top four teams (best four out of five scores from the preliminary and semi-final rounds) from the semi-finals advanced to the final round (2 missions) with the place awards given to those teams that had the highest six out of seven mission scores across the three rounds.
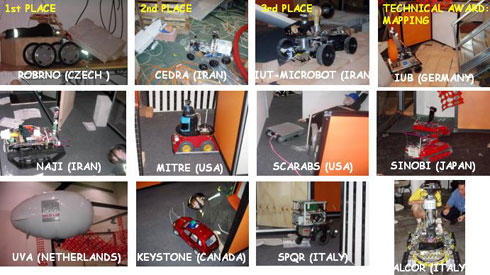
Figure 4: RoboCup2003 - Rescue Robot League Competitors
The first place award winner was the ROBRNO team from Brno University of Technology in the Czech Republic (ROBRNO Awardee Paper.pdf). They developed a very capable custom robot and integrated several components to form an extremely effective operator interface. Their robustly fabricated four-wheel, skid-steered robot was equipped with vision, infrared, and audio sensors for victim identification. The operator interface used a joystick to control robot motion along with heads-up display goggles that tracked the orientation of the operator's head to automatically point the robot's cameras. This allowed superior remote situational awareness and enabled the operator to negotiate narrow arena passages intuitively and dexterously, causing very few penalties. The second place award winner was the CEDRA team from Sharif University of Technology in Iran (CEDRA Awardee Paper.pdf). They developed a wheeled mobility platform with an articulated body design similar to planetary explorers. They also employed a joystick interface with the operator looking at two flat panel video displays. The third place award winner was the IUT-MICROBOT team from the Isfahan University of Technology (IUT) also in Iran (IUT-MICROBOT Awardee Paper.pdf). They demonstrated two robots equipped differently and used cooperatively. One robot was small and fast with only a camera for initial victim identification and operator-generated mapping. Once a victim was potentially located, the second, slower robot was dispatched to the location with more specific victim identification sensors. The technical award winner was the team from the International University - Bremen (IUB) in Germany (IUB Awardee Paper.pdf). They also deployed two robots but were recognized for their arena mapping implementation, which used a proximity range finder to automatically generate obstacle maps of the environment. This was the only autonomous mapping demonstrated during the competition, which was highly encouraged in the performance metric, but did not contribute quite enough points to earn a place award. Other interesting approaches included fully autonomous robots (MITRE Coversheet.pdf), a robot almost directly from the mid-size soccer league (SPQR Coversheet.pdf), and even a blimp (UVA Coversheet.pdf).
Following this competition, these Italian arenas will reside year round at the Istituto Superiori Antincendi in Rome, a fire-rescue training facility, and will support European robotics research.
IJCAI/AAAI - 2003 - Rescue Robot League Competition
| Location: | Acapulco, Mexico |
| Dates: | August 9-15, 2003 |
The 2003 AAAI competition continued to use the NIST transportable arenas to host the competition in Acapulco, Mexico (Figures 5a-5d).

Figure 5a: IJCAI/AAAI - 2003 – Rescue Robot League Arenas (Yellow, Orange, Red)
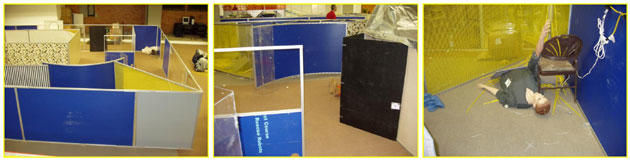
Figure 5b: Pictures of the IJCAI/AAAI - 2003 Yellow Arena

Figure 5c: Pictures of the IJCAI/AAAI - 2003 Orange Arena

Figure 5d: Pictures of the IJCAI/AAAI - 2003 Red Arena
The IJCAI/AAAI-2003 Rescue Robot competition hosted six teams demonstrating both commercially available robots with enhanced control and low-cost autonomous robots (Figure 6). Each team competed in the preliminary round (3 missions) with the top four teams (best two out of three preliminary mission scores) moving on to the final round (2 missions). The place awards were earned by those teams that had the highest four out of five mission scores across the two rounds.

Figure 6: IJCAI/AAAI – 2003 – Rescue Robot League Competitors
The first place team was the Idaho National Engineering and Environmental Laboratory (INEEL) team from the USA. This team used a commercially available ATRV-Jr. equipped with vision, sonar, infrared, and laser sensors to explore the yellow and orange arenas. They featured a comprehensive operator interface that displayed sensor readings, robot status information and environmental maps. But they were most noted for their approach toward sliding autonomy that allowed the operator to choose varying degrees of control from pure teleoperation to full autonomy at any point during a mission. This capability clearly reduced the operator's workload and greatly assisted in negotiating narrow passages. The second place team was Swarthmore College from the USA. This team used a single operator to deploy two robots with varying degrees of autonomy. Their mapping implementation allowed the operator to tag interesting points in a robot view of the environment and use them to compensate for robot position errors. They also demonstrated a web-based victim information form that the operator used to capture and convey pertinent location, situation, and state information for each victim. The technical award winner was the University of New Orleans (UNO) from the USA. They deployed four Sony Aibo dogs and a blimp, but were recognized for their collaborative mapping approach toward building a graphical 3-D model of the environment noting walls, obstacles and victim locations. Other interesting systems included two low-cost but fully autonomous robots. Both teams focused on the low end of the cost spectrum in an attempt to field swarms of similar robots to explore unstructured environments. They explored various parts of the yellow arena, but were unable to identify victims or produce maps, two key factors in the performance metric, so they did not score well. Another team teleoperated a robot with a fixed tether, but had limited success exploring the yellow and orange arenas.
Any Questions?
If you would like additional information on these past Rescue Robot Competitions, please send an email to rescue.robot.league [at] nist.gov (rescue[dot]robot[dot]league[at]nist[dot]gov)