
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
IROS 2021 Robotic Grasping and Manipulation Competition: Manufacturing Track
Due to continued Covid-19 concerns, the competition is formatted to be remote and up to eight teams will be selected to compete. There will be two manufacturing sub-tasks in the competition, wire harness construction and assembly of a motor-driven belt-drive mechanism in the form of a NIST Task Board (NTB). A pre-competition design will be made available for selected teams to continue development of their systems leading up to the competition. A challenge with modified wiring and assembly positions (very similar to the pre-competition NTB), and new parts (identical to all parts used in practice), will be supplied prior to a team’s scheduled on-line competition run.
Teams must apply to compete in this competition. Please send a one to two-page text description of the robotic assembly system that you will use to compete by June 31, 2021 to Yu Sun (yusun [at] mail.usf.edu (yusun[at]mail[dot]usf[dot]edu)). Include descriptions of your autonomous assembly strategies and robotic assembly system; robot manipulators, end effector technology, sensors used for perception, control software and any plans for incorporating the use of supplied CAD data. Solutions that rely primarily on teaching (also called lead through programming) are not recommended. Images and Videos that help describe your system and operating principles are encouraged, but not required. Also include shipping information for sending NTBs in the case that your team is selected as follows:
Company/Organization:
*Attention:
Address:
Country/Territory:
Postal Code:
City or Town:
State/Province/County:
Telephone:
E-mail Address:
* It’s very important that a person’s name is included in the Attention field.
Note: The organizers cannot guarantee the shipping times of the NTBs. Therefore, we have also included all sources and instructions for producing the practice board (pre-competition NTB) on the manufacturing track web site.
Competition Design:
The goal of the competition is to test the capabilities of a robot system in performing assembly operations relative to a small-parts manufacturing process using assembly task boards. The task board for this competition was designed based on similar task boards that have been developed as part of a NIST project to support the advancement of robotic systems for variable small-batch production runs in future manufacturing systems (see: https://www.nist.gov/el/intelligent-systems-division-73500/robotic-grasping-and-manipulation-assembly/assembly), including a new task board under development for wire harness fabrication.
Competition parts have been selected to replicate typical manufacturing assembly operations. Competing robot systems should recognize, grasp, and assemble/disassemble various parts including flexible ones, and assemble/disassemble a new product by quickly reconfiguring the system. The limited competition time and bonus applied remaining time should encourage autonomous system designs where the use of perception (machine vision and force sensing) will eliminate the time associated with teaching (also called lead through programming) and the need for jigs (also called fixturing). The principles of design & manufacture make part data readily available to the automated systems in the form of Computer-Aided Design (CAD) data. Therefore, all CAD models will be made available to competitors in the form of SOLIDWORKS part and assembly files.
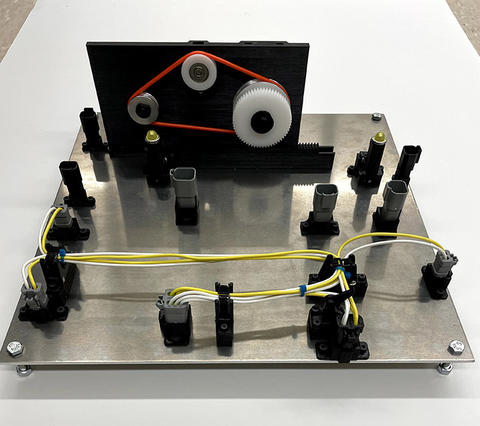
The manufacturing track of the IROS 2021 Robotic Grasping and Manipulation Competition will consist of two subtasks; a wire harness construction subtask and an assembly subtask, both using a task board. Figure 1 shows the conceptual design to be used for the IROS 2021 task board. Many of the components used in the belt drive are the same as those previously used on the 2019 and 2020 competitions. When the competition task board is removed from a sealed box at the start of the competition run, an example kit layout is also provided to present parts for the assembly subtask. During the competition the location of the parts on the task board and the kit will change.
In this remote format, each team’s competition run will be recorded by teams in their respective robot laboratory and viewed live using video conferencing by a remote judge. Each team is responsible for video recording their entire competition period and must send this video to the competition organizer. The locations of the task board and kit must be randomly defined using Velcro attachment points and tape at the start of the competition under the supervision of the remote judge. Random board placement and part position changes are used to highly encourage the use of autonomous system designs. More detail is provided in the rules document below.
- Preliminary rules and scoring for the competition (subject to change)
- Instructions for producing practice task board
- Kit files
- SOLIDWORKS Computer Aided Design (CAD) files
- Stereolithography (STL) files
- Miscellaneous files - coming soon
- Demonstration video of task board assembly:
This video provides users of the IROS 2021 Robotic Grasping and Manipulation Competition: Manufacturing Track task board with a description of the general steps required to assemble the board during competition subtasks. Users of the board first prepare the competition setup by setting wires and fasteners in a dispenser of choice, randomly placing the kit layout with components placed on each location, and randomly placing the task board. Competitors then begin the competition (clock starts) by autonomously assembling the wire harness using their robot system. Once completed, the clock stops while competitors attach cable ties to designated points on the wire harness, detach the harness form the task board, and place it to the side. The clock is restarted and competitors autonomously assemble the belt drive with their robot system. Once completed, the competition clock is stopped and teams have the opportunity to test the operation of the belt drive by manually assembling either their fabricated wire harness or a NIST provided wire harness to the appropriate connectors for additional points. [No Audio]
Contacts
-
(301) 975-3455
-
(301) 975-4833