
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Degradation Measurement of Robot Arm Position Accuracy
Data collected on the UR robot to measure the degradation of robot arm position accuracy for robot system health assessment
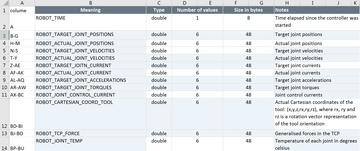
A grid moment of the universal robot (UR5*) is planned. The tool center positions (TCP) (x,y,z) of the robot are measured by a 7-D measurement system developed at NIST. Differences are compared from the nominal positions to the measured positions. Controller level sensing data are also collected from each joint, to understand the influences of position degradation from temperature, payload, and speed. Controller level information provides clues about the root causes of the robot performance degradation, by providing information about the actual and joint positions, velocities, currents, accelerations, torques, and temperatures.
The data sets provide both the robot high level TCP positional health data and the controller level components’ detail information. The data sets can help to build the matrix of robot health monitoring algorithms and tools, support the research of robot prognostic, and health management (PHM), and support the validation and verification of the industrial PHM implementation.
Data:
The following .csv files are controller level sensing data collected from each joint at different setting of temperature, payload and speed. Data are collected at 125HZ.
- UR5TestResult_HalfSpeed_payload1.6lb_1.csv: test 1 of robot half speed running with 1.6lb payload
- UR5TestResult_HalfSpeed_payload1.6lb_2.csv: test 2 of robot half speed running with 1.6lb payload
- UR5TestResult_HalfSpeed_payload1.6lb_3.csv: test 3 of robot half speed running with 1.6lb payload
- UR5TestResult_FullSpeed_payload1.6lb_1.csv: test 1 of robot full speed running with 1.6lb payload
- UR5TestResult_FullSpeed_payload1.6lb_2.csv: test 2 of robot full speed running with 1.6lb payload
- UR5TestResult_FullSpeed_payload1.6lb_3.csv: test 3 of robot full speed running with 1.6lb payload
- UR5TestResult_HalfSpeed_payload4.5lb_1.csv: test 1 of robot half speed running with 4.5lb payload
- UR5TestResult_HalfSpeed_payload4.5lb_2.csv: test 2 of robot half speed running with 4.5lb payload
- UR5TestResult_HalfSpeed_payload4.5lb_3.csv: test 3 of robot half speed running with 4.5lb payload
- UR5TestResult_FullSpeed_payload4.5lb_1.csv: test 1 of robot full speed running with 4.5lb payload
- UR5TestResult_FullSpeed_payload4.5lb_2.csv: test 2 of robot full speed running with 4.5lb payload
- UR5TestResult_FullSpeed_payload4.5lb_3.csv: test 3 of robot full speed running with 4.5lb payload
- UR5TestResult_coldStart_HalfSpeed_payload4.5lb_1.csv: test 1 of robot half speed running with 4.5lb payload, cold start of robot
- UR5TestResult_coldStart _HalfSpeed_payload4.5lb_2.csv: test 2 of robot half speed running with 4.5lb payload, cold start of robot
- UR5TestResult_coldStart _HalfSpeed_payload4.5lb_3.csv: test 3 of robot half speed running with 4.5lb payload, cold start of robot
- UR5TestResult_coldStart _FullSpeed_payload4.5lb_1.csv: test 1 of robot full speed running with 4.5lb payload, cold start of robot
- UR5TestResult_coldStart _FullSpeed_payload4.5lb_2.csv: test 2 of robot full speed running with 4.5lb payload, cold start of robot
- UR5TestResult_coldStart _FullSpeed_payload4.5lb_3.csv: test 3 of robot full speed running with 4.5lb payload, cold start of robot
Related Publications:
- Qiao, G. and Weiss, B.A., “Degradation Analysis for Industrial Robot Systems,” the 2017 ASME International Manufacturing Science and Engineering Conference, June 4-8, University of South California, SC, USA, 2017.
- Qiao, G., Schlenoff, C., and Weiss, B. A., “Quick Positional Health Assessment for Industrial Robot Prognostics and Health Management (PHM),” IEEE International Conference on Robotics and Automation May 29 - June 3, 2017, Singapore.
- Qiao, G. and Weiss, B.A., “Development of Measurement Science to Assess PHM for Manufacturing Robotics”, International Journal of Prognostics and Health Management.
- Weiss, B.A. and Qiao, G. “Multiple layer data fusion development for robotics PHM,” the 2017 ASME International Manufacturing Science and Engineering Conference, June 4-8, University of South California, SC, USA, 2017.
Related Projects:
Contacts
-
(301) 975-2865