
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
One Way GNSS Time Transfer
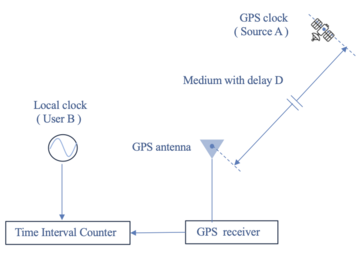
The most common way to transfer time is with a transmitted signal, usually an electromagnetic (radio) wave. However, there are several variations on this approach. The simplest techniques, and generally the most limited in performance, is one-way time transfer (shown in the figure below). Here the source, A, simply sends a time signal to the user, B, through a transmission medium. The delay, d, over a transmission path is at least 3.3 microseconds per kilometer. Therefore, some correction for this delay is required unless the path is very short, or the accuracy requirement is very loose. If high accuracy time transfer is desired in a one-way system the physical locations (coordinates) of the two clocks must be known so that the path delay can be calculated. For time transfer, the absolute magnitude of the path delay must be known. For frequency transfer, only the variability of the delay (the path stability) is important. NIST Radio Station WWVB and the telephone voice announcements are two examples of one-way time transfer systems. The Global Navigation Satellite System (GNSS) also provides time information via the one-way technique and is the most accurate worldwide one-way time transfer system. Global Positioning System (GPS) is the first and most widely used GNSS.
GPS satellites broadcast a timing signal (a tick of the clock) on a phase modulated L-band carrier along with information identifying the time for which the tick corresponds. The satellites broadcast a time code referenced to the clock on the satellite, but there is also information enabling the user to obtain an estimate of GPS system time as well as UTC(USNO). The user's receiver may then compare the arrival time of the GPS signal to the local clock with a Time Interval Counter (TIC). The major challenge here is to account for the propagation delay. The geometrical delay is obtained from the receiver's location (which can be obtained from the GPS system) and from the broadcast satellite positions. Major sources of timing error are the geometrical delay, the effect of the ionosphere and troposphere on the propagation time, multipath, and hardware delays. Currently, the GPS system provides time to the general public with uncertainties measured in nanoseconds. With a well-designed receiver system the user can obtain the time to better than 100 ns in a few minutes, and to about +/- 10 ns with a 24 hour average (and a good local clock).
The receiver's location can, in principle, be known to a few centimeters (cm), though this takes considerable effort. A location determined from the GPS CA code in only a few minutes may be off by tens of meters. Users interested in ns accuracy must know their position to within a few meters. The broadcast satellite positions are only accurate to a few meters, and therefore also limit the accuracy of the geometrical delay to only 3 to 6 ns.
The ionosphere and troposphere also have a significant impact on propagation delay. Ionospheric delays can range from a few nanoseconds at night in the vertical direction to hundreds of nanoseconds during the day at low elevation angles. The navigation message broadcast by the satellites contains a model of the ionospheric delay, but this may be accurate to only within a factor of two. There are ways to improve the ionospheric correction with direct measurements using the two-frequency method or with code and carrier phase measurements. The accuracy with which the delays and delay variations are removed depends on how much effort one is willing to put into the task. The total excess delay introduced by the troposphere is in the range of tens of nanoseconds, and can generally be corrected to an uncertainty of a few nanoseconds. Multipath errors can be as large as tens of nanoseconds. Hardware instabilities and inaccuracies will generally be a few nanoseconds or larger. Many of these errors have a daily, or diurnal cycle, and can be averaged down if the users local clock is sufficiently stable over 24 hours.
The only relativistic effect that is included in GPS time transfer is the Sagnac delay. This is calculated from the positions and relative velocities of the two stations and can be as large as 200 ns. The uncertainty in the Sagnac effect is small compared to other sources of error.
To view one-way GPS data received at Boulder and compared to UTC(NIST), please visit the GPS data archive.
Contacts
-
(303) 497-4082