
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.

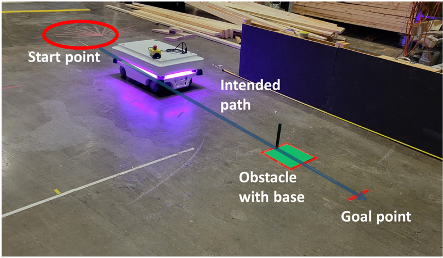
NIST has developed a mobile manipulator testbed to evaluate the dynamic localization of the mobile manipulator relative to a target with continuous motion (i.e., the manipulator and mobile robot are in simultaneous motion while physically connected) and non-continuous motion, which recently includes workpiece disturbances. The testbed enables the research and development of measurement and analysis methodologies.
Mobile manipulators, comprised of advance mobile robots with onboard manipulation capabilities, have the potential to enable agile manufacturing. Mobile manipulator performance metrics and measurement methods allowmanufacturers and end users to understand the capabilities and advancements needed to improve the adaptive capabilities in dynamic, unstructured manufacturing environments and when operating on large-scale components with curved, complex profiles, such as aircraft wings, wind turbine blades, and additive manufacturing parts with large build volumes.
NIST is leading the way of development of standard test procedures to support the innovation of mobile manipulators for agile manufacturing thru ASTM Committee F45 on Robotics, Automation, and Autonomous Systems (Subcommittee F45.05 on Grasping and Manipulation)
This work informs development of standard test procedures to support the innovation of mobile manipulators for agile manufacturing.
NIST is leading the way for developing performance metrics and measurement methods that are needed by industry to characterize the capabilities and performance of Unmanned Ground Vehicles (A-UGVs), also known as Autonomous Mobile Robots (AMR).
The development of standards through ASTM Committee F45 on Robotics, Automation, and Autonomous Systems encompasses environmental conditions and effects (F45.01), docking and navigation (F45.02) , object detection and protection(F45.03), and terminology, capabilities, and test configuration (F45.91).
NIST will develop measurement methods and technologies for A-UGVs to reflect user requirements and operating environments including forced de-localization, static and dynamic loading, load structures, homogeneous/heterogenous multi A-UGV operations, and collaborative applications with other robotic systems.
NIST has developed information models, autonomy level guidance, measurement methods, and standards to describe the operating environments of A-UGVs and their performances. The information models describe to A-UGV users what environmental factors need to be considered and what A-UGV capabilities are required to operate against those factors. The autonomy level guidance describes the various services A-UGVs can provide depending on their capability. Measurement methods enable users to understand the A-UGV performance and their sensitivity to the given environmental factors and operational parameters. Based on the information model and measurement methods, various tests can be conducted under industry-like environmental conditions.
Contacts
-
(301) 975-5068
-
(301) 975-5319