
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Continuous Mobile Manipulator Performance Experiment Data (2022)
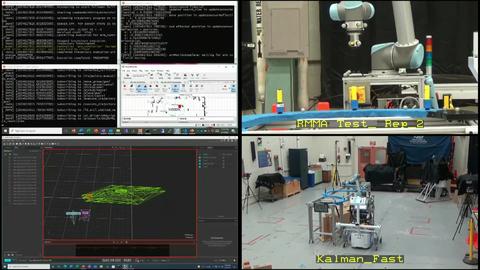
Mobile manipulators, which are robotic systems integrating an automatic or autonomous mobile base with a manipulator, can potentially enhance automation in many industrial and unstructured environments. Namely, large-scale manufacturing processes, typical in the aerospace, energy, transportation, and conformal additive manufacturing fields, encompass a notable subset of potential future mobile manipulator use-cases. Utilizing autonomous mobility for manipulator re-positioning could allow for continuous, simultaneous arm and mobile base cooperation, which is referred to as i.e., continuous performance. Continuous mobile manipulator capabilities may hold particular benefit for large, curved, and complex workpieces. However, such flexibility can also introduce additional sources of performance uncertainty, preventing mobile manipulators from satisfying stringent pose repeatability and accuracy requirements. To identify and quantify this uncertainty, the Configurable Mobile Manipulator Apparatus was developed by the National Institute of Standards and Technology. Previous test implementations with the apparatus included non-continuous mobile manipulator performance, such as static and indexed performance, but continuous performance measurement had only been previously demonstrated in simulation and on proof-of-concept hardware. This dataset was obtained through the transfer of simulations and algorithms for continuous registration to an industrial mobile manipulator platform and through a subsequent 2^3 factorial designed experiment to compare the performance and robustness of two continuous localization methods: 1) A deterministic spiral search and 2) A stochastic Unscented Kalman Filter (UKF) search across two selected mobile base speeds and sides of the CMMA. Supplementary data obtained prior to the experiment, such as source code, calibration data, mobile base map and configuration data, coordinate system measurements, and robot/client to ground-truth system time synchronization is also included, along with the analysis source code and results files generated in conducting the performance evaluation.