
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Benchmarks and Datasets to Tackle Real-World Robotic Manufacturing Challenges
Overview
This workshop will bring together academia and industry to share research and perspectives on the challenges facing manufacturing industries in the areas of grasping and manipulation with emphasis on manufacturing assembly operations. The workshop will also discuss past uses and improvements of NIST supported test protocols and benchmarking tools, for evaluating robotic capabilities as a means of translating industry problems into a concise problem set researchers to address. These NIST Assembly Task Boards (ATB) serve as benchmarking tools for manufacturing-based robotic assembly tasks. Robot grasping and manipulation competitions that have featured the assembly tasks of all 4 ATB have sought to encourage teams to meet the needs of industry but have yet to see the connection from competition solution to industry solution. Workshop discussion will be used bridge the gap between real industry problems and the academic research community vital to the development of next-generation manufacturing systems.
Content
The workshop will be a full day, in person meeting. It will include both industry and academics working with grasping and manipulation robotics. Presenters from either side will discuss the work they have done specific to the manufacturing industry, ensuring that the talking points are relatable and encourage discussion. Furthermore, the workshop will host a panel session with multiple industry representatives so that the audience can ask directed questions to better understand the needs of the industry. Finally, a poster session will be held to connect related other work to the discussion.
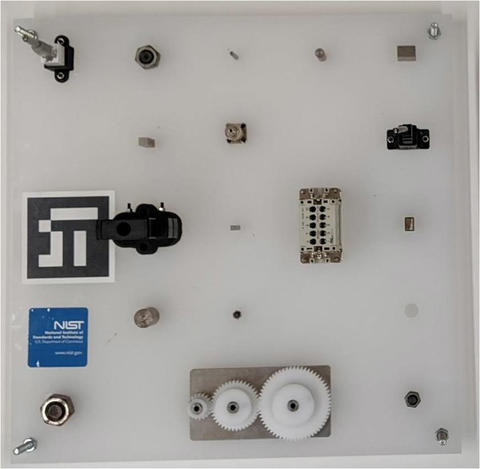
NIST assembly task board (ATB)
To support this initiative NIST ATB1 will be given out to a limited number of attendees for benchmarking their robotic assembly research, free of charge. This board features peg insertions, nut threading, and connector assemblies.
Venue
Organizers
- Kenneth Kimble, National Institute of Standards and Technology (NIST), kenneth.kimble [at] nist.gov (kenneth[dot]kimble[at]nist[dot]gov)
- Miguel Saez, General Motors, miguel.saez [at] gm.com (miguel[dot]saez[at]gm[dot]com)
- Minas Liarokapis, University of Auckland, minas.liarokapis [at] auckland.ac.nz (minas[dot]liarokapis[at]auckland[dot]ac[dot]nz)
- Bin Hu, Institute of Automation, Chinese Academy of Sciences, binhu [at] ia.ac.cn (binhu[at]ia[dot]ac[dot]cn)
Speakers




Program Schedule
| Time | Talk | Topic |
| 9:00-9:10 |
Kenny Kimble Introduction |
|
| 9:10-9:40 |
Miguel Saez Integration of perception, intelligent control, and grasping for automation of complex assembly tasks |
Industry |
| 9:40-10:10 | Eugen Solowjow | Industry |
| 10:10-10:30 | Poster Session 1 | 4 presentations, 5 mins a piece |
| 10:30-11:00 | Coffee Break | |
| 11:00-11:30 |
Minas Liarokapis Datasets and Benchmarks for Human to Robot Skill Transfer in Dexterous Manipulation: From Industrial Assembly to Home Robotics |
Academia |
| 11:30-12:00 | Bin Hu The Realization of Intelligent Robot System for Manufacturing Challenges |
Academia |
| 12:00-12:30 | Open Discussion | |
| 12:30-13:30 | Lunch | |
| 13:30-14:00 |
Kenny Kimble Benchmarking robotic grasping and manipulation using industry related assembly tasks |
NIST |
| 14:00-14:30 |
Megan Zimmerman Manufacturing dataset initiative |
NIST |
| 14:30-14:50 | Poster Session 2 | 4 presentations, 5 mins a piece |
| 14:50-15:20 | Coffee Break | |
| 15:20-16:00 | Panel Discussion | Industry speakers answer questions |
| 16:00-16:30 | Open Discussion | |
| 16:30-16:35 |
Kenny Kimble Closing Remarks |
END |
Contact
Please contact Kenny Kimble with any questions or comments via e-mail: Kenneth.kimble [at] nist.gov (Kenneth[dot]kimble[at]nist[dot]gov)