
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
3D Data for the Evaluation of Point-Based, Rigid Body Registration Error
Datasets to evaluate the performance of point-based, rigid-body registration may be downloaded from this site. Registration is the process of transforming one coordinate frame to another coordinate frame.
The datasets contain 3D position measurements obtained from three instruments: a laser tracker (LT), a motion capture system (System A), and a large-scale metrology system (System B). The positions are for points that are in a semi-regular, 5 x 5 x 5 grid. The grid covers a volume that is approximately (3 x 3 x 1.8) m [L x W x H] (area within the blue lines in Fig.1). The measurement uncertainties are ± 25 μm for the laser tracker, ± 250 μm for System B, while the accuracy of System A is only specified as sub-millimeter. The datasets for each instrument were collected in the instrument’s local coordinate frame.

The 125 points on the grid are called fiducials and represent the set of points from which fiducials will be selected for registering one coordinate frame to another coordinate frame. In addition to the 125 fiducials, an additional 16 points, called Test points, were measured. Test points were randomly collected within the 5 x 5 x 5 grid, are not used for registration, and are used to determine the quality of the registration process.
For LT, only one measurement was obtained at each position; each recorded measurement was the average of 50 measurements. For Systems A and B, at least 200 repeated measurements were obtained at each position. In brief, the data collected from System A has larger bias and lower noise relative to the data collected by System B.
Description of the data collection and characterization of the data may be found in:
Publications
-
A NIST Internal Report (NISTIR) 8111, Optimization of Registration Performance Metrics;
http://dx.doi.org/10.6028/NIST.IR.8111 -
A Precision Engineering Paper, “Selection of fiducial locations and performance metrics for point-based rigid-body registration”;
http://dx.doi.org/10.1016/j.precisioneng.2016.09.010
Data Set
- Download Data
-
Files
-
The units for all of the data files are millimeters.
-
Systems A and B:
- File names are the same as the point name with a .csv extension.
- Each file contains at least 200 repeat measurements of the XYZ coordinates of the point; one XYZ value per line.
- LT (no repeat measurements):
- XYZ coordinates of the fiducials are stored in LT_Fiducial_Pts.csv where the first entry is the point name and the next three values are the XYZ values, respectively.
- XYZ coordinates of the test points are store in LT_TestPts.csv where the first entry is the point name and the next three values are the XYZ values, respectively.
-
Naming convention for Fiducials
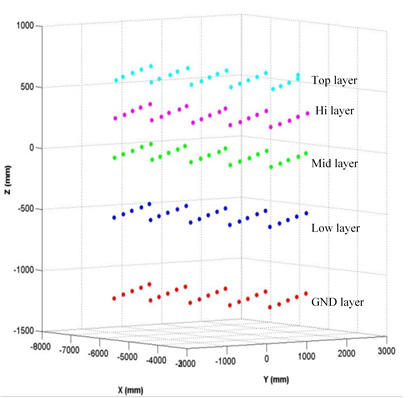
The 5 horizontal layers of the grid are named: GND, Low, Mid, Hi and Top (see Fig. 2). Within each horizontal layer, the 2D grid consisted of A to E rows and 1 to 5 columns. Thus, a point named SystemB_Hi_D5 was obtained by System B, located in “Hi” horizontal layer, row D, column 5.
Naming convention for Test Points
Test points were labeled L1 to L8 and H1 to H8. The name of the test point is preceded by the instrument that collected the data. Thus, LT_H2 is test point H2 collected by LT.
Please reference our DOI when using our data for research and/or publications.
https://doi.org/doi:10.18434/M39G6H
KEYWORDS: Fiducials, registration, point-based registration, registration error, targets, transformation.
Contacts
-
(301) 975-6408