
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
BT7: Upgrade to NICE Control Software
The instrument control software at BT7 has been upgraded to the current version of NICE.
The instruments at the NCNR require a reliable, powerful and flexible control system in order to take full advantage of the very limited neutron beamtime and allow for non-routine sample environments and experiments to be incorporated. NICE provides these features and is implemented using a client-server architecture:
- The server performs the critical operations of coordinating instrument motions, device control and measurements in order to execute an experimental plan, and then gathering all the results into archival data files that are provided to the users.
- The client program provides a graphical interface through which users operate the instrument and create the experiment plans to be executed by the server while providing graphs and feedback on the results of current operations and scans, as well as a visual representation of the current state of the instrument. Simple control can be achieved through the use the Trajectory Manager GUI; advanced control is possible through the application programming interface (API). Multiple clients can connect simultaneously throughout the building allowing someone to setup an experiment the instrument and monitor it from their office.
By default the standardized NeXuS file format is supported as an output for each instrument, while additional file writers (e.g. text columns) can be added and turned on and off by instrument scientists.
Milestones achieved during the unexpected outage
BT7 is the first triple axis to be fully supported under NICE. Many components were created for BT7 with other triple axis instruments in mind.
- BT7 modules created for NICE
- Sample Alignment - The Core Triple Axis sample alignment system was created for BT7. This was designed to operate in-plane and a future extension has already been designed to support out of plane when this become feasible for large sample environment equipment.
- Trajectory Manager - This tool leverages the NICE's underlying trajectory system, which is extremely flexible, to create the most common trajectories run at BT7. Users can run these trajectories as is, or modify them to produce more customized measurements and data organization.
- Polarized Beam - NICE supports polarized beam operations on BT7. The Trajectory Manager can build trajectories which incorporate polarized beam changes at a customized "level" in the measurement, to optimize measurement speed (inner most loop) vs. maintaining polarizer efficiency (outer most loop) to everything in between.
- Instrument Alignment - Created a system for aligning the core triple axis motors on BT7 (monoTwoTheta and sampleTwoTheta) using known, well characterized samples.
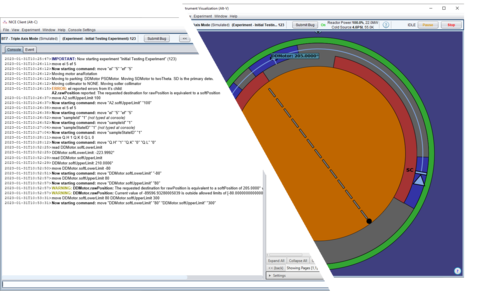
- Instrument Visualization - NICE displays a live, top-down, cartoon representation of the instrument, which updates in real time. For BT7 we created some of the core visualization systems for Triple Axis which are used elsewhere, such as a DFM.
- Users can zoom, pan, rotate, etc. or they can "lock-on" to different camera views, such as a standard beam-sample-detector display.
- Mouse-over provides live status of precise position of motors, limits and important higher level quantities.
- Provides highly detailed views of the most important parts of the instrument:
- DFM - Shows every motor's position realistically. Shows a top-down profile/shadow of each blade as its focused.
- Analyzer - Shows detector and collimator carriages as well as the analyzer blades.
- Simulated BT7server is available for testing offline or at home. Simulation differs from real system in only that it communicates with simulated hardware, meaning ~98% of the tested code is identical to the real system.
- Added improved plotting system - Based on triple axis specific requests, along with outstanding requests from other instruments, the entire plotting system was rewritten and replaced. Key features:
- Plotting multiple y-axis variables
- Overlaying data sets. You can overlay any two plots you can access (see #2). Every plot/y-axis combo is graphed simultaneously.
- Panning/Zooming, basically good modern navigation of the plot
- A smart tick labeling system
- Plot past data - Since plotting past data was thought of as strictly a reduction/analysis team issue NICE was not built with this capability in mind, and only allowed plotting the most recently collected scans. This new plotting system allows users to browse and plot all previously collected data with NICE seamlessly transferring data behind the scenes as someone browses. All plotting features are available for old data including overlaying it with new data.
- Integration with other NICE features such as findpeak and precise unit/precision display of all values.
- BT7 DFM focusing logic now managed by NICE. When the previous instrument control system is retired, the DFM motor computer can largely operate as a simple array of motors.
- All major features have been tested on instrument hardware, and BT7 is now fully upgraded to the most current version of NICE.