
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Level 1-3 Open Test Lane and Scenarios
The Open Test Lanes evaluates 5 different flight paths to identify objects from safe altitudes in open environments. These tests are scalable for all sizes of aircraft to demonstrate positive control at all times with accurate perches. They can be performed outdoors or indoors to control lighting and weather. The smallest size lane fits on an indoor basketball or tennis court for small drones and/or novice pilots to practice safely without flying in the national airspace.
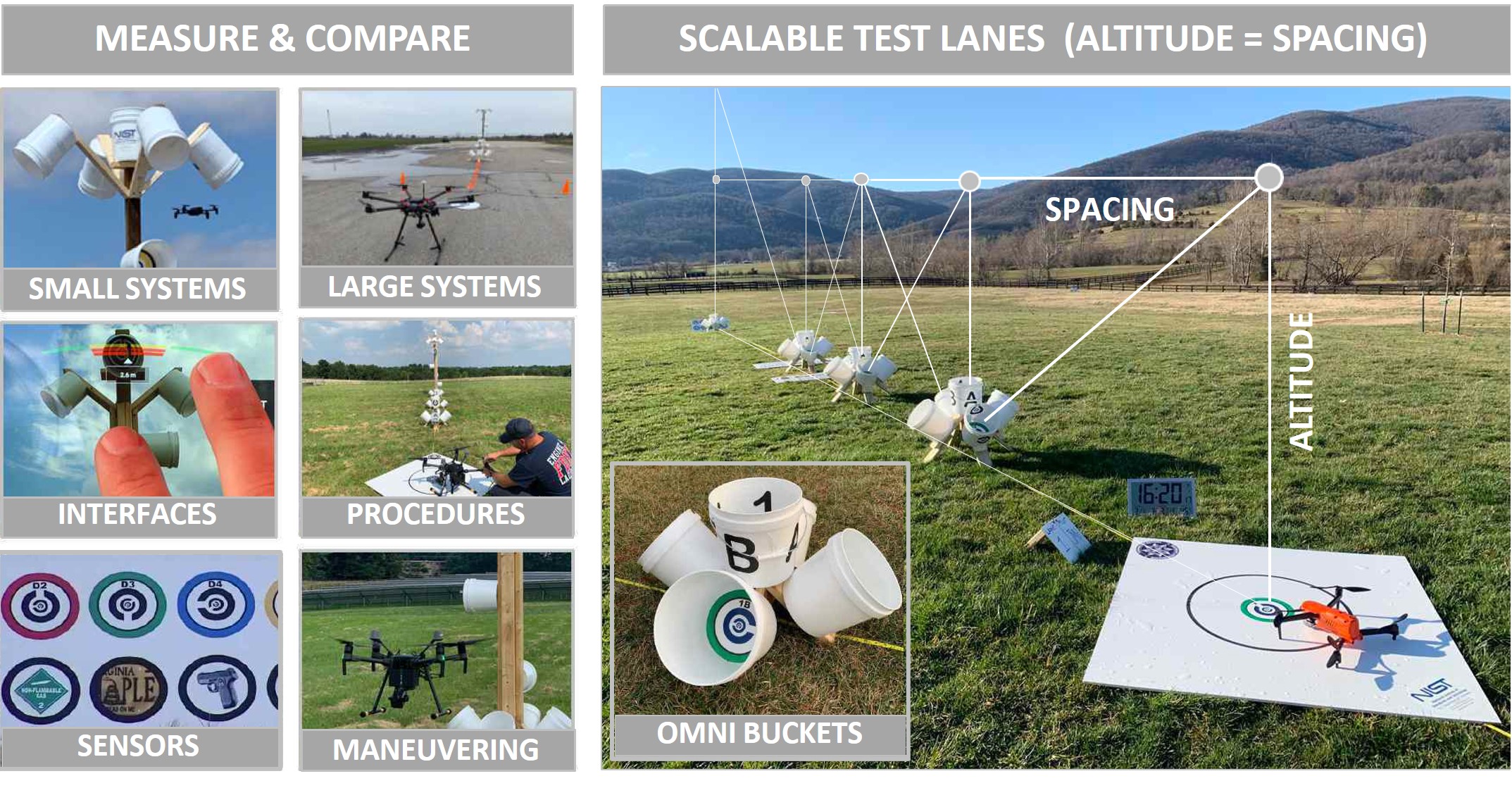

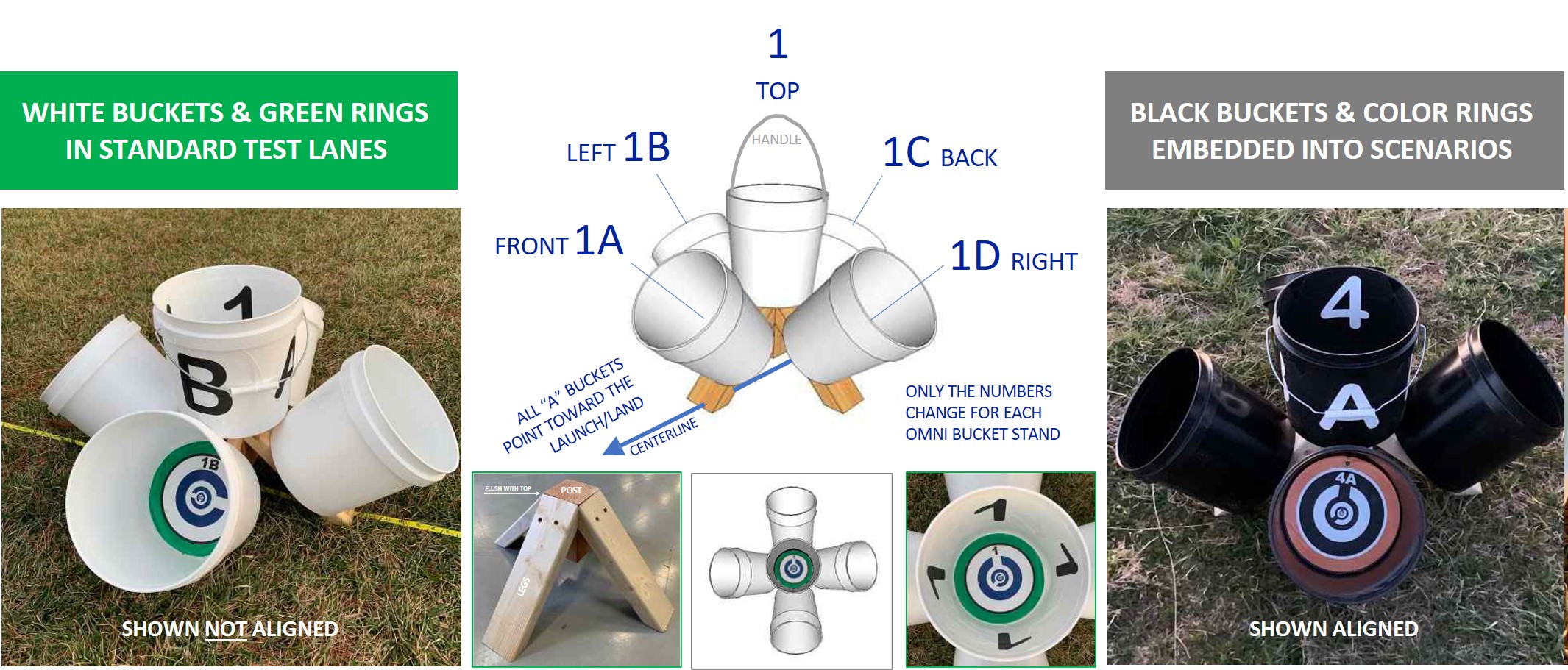
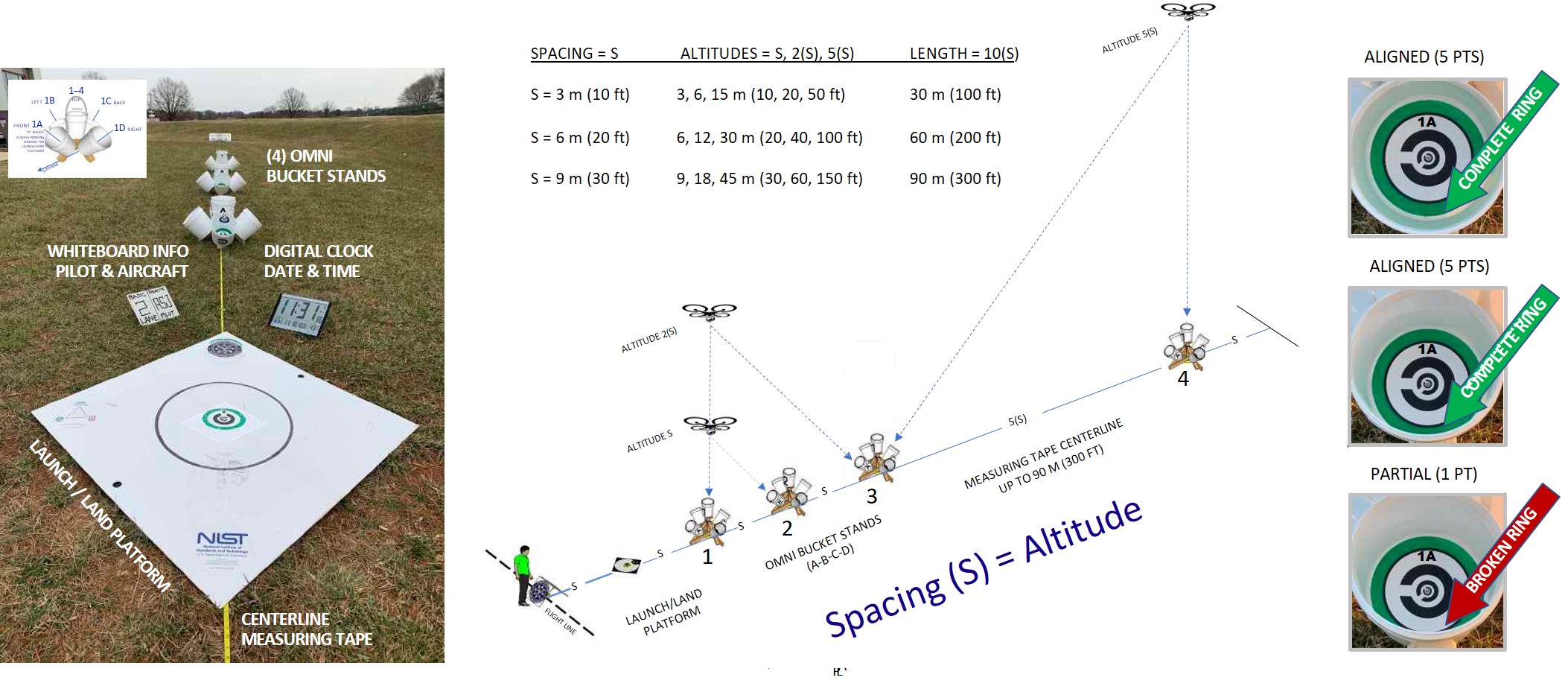

The Open Test Lanes were located near related scenarios for wide area search of a plane crash site and a vehicle identification scenario. Two were set up with 3 m (10 ft) spacing between omni bucket stands and one was set up with 6 m (20 ft) spacing to be operationally relevant for various scenarios. All were set up with alternating white and black bucket stands to evaluate remote pilot proficiency using the Payload Functionality variant of the tests rather than the basic Maneuvering variant of the tests that use all white buckets throughout. The Payload Functionality tests involve a modest workload for the remote pilot to pantilt-zoom, focus, and control exposure at each bucket for scoring after the trial. The alternating white and black buckets force maximum exposure control.
The Open Test Lane evaluates flight paths to identify objects from safe altitudes in open environments. Related scenarios include wide area searches such as this simulated plane crash site that used all the same omni bucket stands from the Open Test Lane. There are 20 targets overall, each with 5 increasingly small features to identify for a total of up to 100 points available for a complete trial. This enables comparison of scores for pilots and aircraft that can reliably perform the various bucket alignments and identify the smallest visual/thermal acuity features across all available acuity targets. The trial time limit is typically set to 20 minutes to remain within one battery charge and to maintain a schedule throughout the day for multiple pilots. Time limited trials also enable direct comparisons of scores for completeness and efficiency. Only scores using similar aircraft and trial times are directly comparable to evaluate pilot proficiency, but a variety of different aircraft can be used to compare overall scores and ease of use.


The Open Test Lane also leads pilots toward vehicle identification scenarios from safe hover altitudes above nearby obstacles. The designated flight path around the vehicle includes an orbit with equal radius and altitude to align with the 45-degree angled omni buckets on the roof (bucket targets A1, B1, C1, D1). The chosen orbit radius and altitude is based on the height of surrounding obstacles, the intended mission requirements, the aircraft’s zoom capabilities, etc. Any orbit can be used, but only trials with similar orbits and trial times are comparable. There are also precise perch positions and orientations on the road directly under the front and rear orbit positions. These perches evaluate landing accuracy along with the functional pan-tilt-zoom capabilities of the aircraft while landed at the chosen orbit radius. Perching demonstrates the aircraft’s capability to maintain surveillance while conserving battery. The perch targets are buckets under the vehicle that represent operationally significant underbody objects in shadow (bucket targets A5, C5). Each side of the vehicle has 5 exterior visual/thermal targets to identify from the chosen radius, altitude, and perch positions. There are 20 targets overall, each with 5 increasingly small features to identify for a total of up to 100 points available for a complete trial. All targets are identified from the designated flight path starting with the angled buckets on the roof to verify the altitude and radius, then exterior features or surrounding ground objects, and exterior window targets to identify while presumably looking for interior objects. All targets are on the exterior of the vehicle to eliminate potential variations in scoring due to interior target obstructions, window glare, tinting, etc. Interior target identifications can be considered bonus points because they are less comparable across trials due to changes in sunlight.