
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Collaborations

Collaborations are intended to be mutually-beneficial opportunities to grow NIST research in addition to supporting the verification and validation of NIST-developed innovative technologies, methods, datasets, and tools. The below describes potential collaborations that NIST personnel are seeking with industry, academia, or other government organizations to strengthen its research portfolio. Additionally, collaborations are a critical mechanism to stimulate and accelerate technology transfer of NIST technologies and capabilities into the target stakeholder communities.
Identification and Isolation of Workcell Degradation

Challenge: It can be costly to determine if the health of a robot workcell has degraded before quality and/or productivity is impacted.
Solution: NIST has developed a relatively low-cost, minimally invasive test method, when paired with the position verification sensor, that can efficiently assess the change in accuracy at various points along the kinematic chain (e.g., robot arm, gripper) with respect to the workspace.
Desired Collaborations: NIST researchers hope to pilot the test method, and companion position verification sensor, in manufacturing environments to obtain data and feedback to further verify and validate both the test method and sensor.
Benefits of Collaboration: Collaborators have the potential to get perspective of if, where, when, and/or how the accuracy of their robot workcells degrade prior to unacceptable quality and/or productivity losses.
Technical Contact: brian.weiss [at] nist.gov (Brian Weiss)
Investment Analysis in Advanced Maintenance Techniques

Challenge: There is limited knowledge and research on the costs/benefits of advanced machinery maintenance in manufacturing.
Solution: NIST has conducted a series of investigations into the costs/benefits of investing in advanced machinery maintenance in manufacturing, including data collection through a survey sent to manufacturers.
Desired Collaborations: NIST aims to identify one or more manufacturers for conducting a case study of investing in predictive maintenance. This will apply methods of investment analysis outlined in NIST AMS 200-5 and utilize NIST’s Smart Investment Tool.
Benefits of Collaboration: Collaborators will gain additional insight into their potential investment in predictive maintenance, including a rate of return, payback period, sensitivity analysis, and other calculations that the manufacturer could use for decision making and understanding the return for investing in advanced maintenance capabilities.
Technical Contact: douglas.thomas [at] nist.gov (Douglas Thomas)
Motorized Six-degree (6-D) Smart Target for Robot Accuracy Degradation Assessment
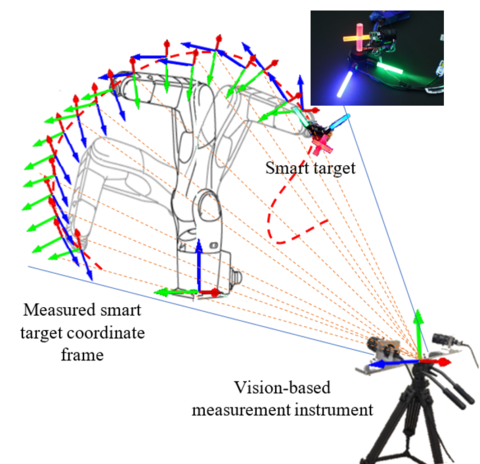
Challenge: Robot accuracy degradation can negatively impact operations and is relatively difficult to detect unless compromised part quality, obvious failure, or a stoppage occurs. Performing real-time 6-D pose measurements for robot accuracy assessment may be challenging for industrial users.
Solution: NIST has developed a smart target that can be integrated with vision-based measurement instruments to acquire 6-D information (x, y, z, roll, pitch, and yaw) of a moving object with high accuracy. A robot health assessment method was developed to assess a robot’s tool center accuracy degradation in as little as 10 minutes.
Desired Collaborations: NIST researchers hope to pilot the method in operational use cases that need to precisely track the pose of an object or have concerns about the accuracy degradation.
Benefits of Collaboration: Collaborators have the potential to monitor robot degradation which may reduce the unacceptable decline in quality or unexpected shutdowns, further, improve the robot accuracy by performing robot calibration using the smart target.
Technical Contact: guixiu.qiao [at] nist.gov (Guixiu Qiao)
Smart Machine Tools: Linear Axes
Challenge: Machine tool wear causes unknown performance changes and unplanned downtime. Given this reality, can machine health be ascertained in 5 minutes?
Solution: On-machine measurement science, via a NIST-developed inertial measurement unit (IMU) and data analytics, has been developed to diagnose performance and determine root causes of faults.
Desired Collaborations: Pilot the IMU in a manufacturing environment to obtain data and feedback for further verification and validation of the IMU and corresponding analytics.
Benefits of Collaboration: Collaborators obtain knowledge of changing linear axis performance to maintain part quality and prevent unplanned downtime.
Technical Contact: gregory.vogl [at] nist.gov (Greg Vogl)
Smart Machine Tools: Spindles

Challenge: Near 24/7 production causes unknown spindle wear and failures leading to unplanned downtime.
Solution: A spindle PHM testbed with force, displacement, and inertial sensors has been developed to measure spindle health before cutting and estimate real time tool to workpiece forces and displacements during cutting.
Desired Collaborations: It is desired to collaborate with data analysts to correlate the many data streams and “train” the 6 degree of freedom (DOF) sensor signals for real time monitoring during cutting.
Benefits of Collaboration: Collaborators obtain knowledge of spindle health and cutting performance to maintain part and tool quality, and prevent unplanned downtime.
Technical Contact: gregory.vogl [at] nist.gov (Greg Vogl)