
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Helping to Clean Up a Disaster Inside the Chernobyl ‘Mega Tomb’
It’s been used for everything from bridge construction to paint-stripping aircraft, and NASA once even considered basing an all-terrain lunar rover on it. But the most important role ever assigned to the National Institute of Standards and Technology (NIST)’s RoboCrane ultra-stable platform is the job of helping clean up the site of the worst nuclear accident in history, the former Chernobyl nuclear power plant in northern Ukraine.
On April 26, 1986, a power surge resulted in a core explosion and fire in Chernobyl’s Unit 4 reactor. The disaster shot a plume of highly radioactive materials into the atmosphere and made it necessary to evacuate nearly 340,000 people from the surrounding regions. The International Atomic Energy Association and the World Health Organization estimate that 4,000 cancer deaths since that date may be attributable to the radiation released.
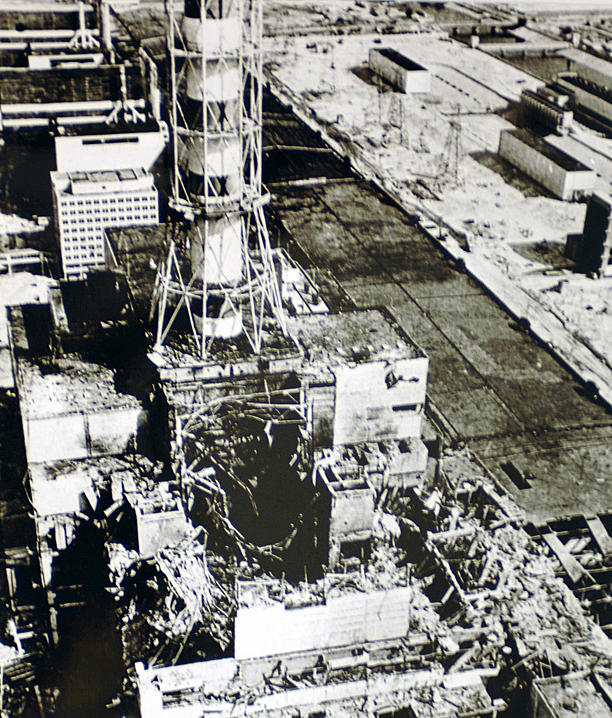
A few weeks after the accident, the destroyed reactor was covered by a quickly built concrete and steel “sarcophagus.” In 1997, the G-7 nations, the European Commission and the Ukraine government began a program to convert the disaster site into an environmentally safe zone. More than 40 governments committed more than $1.5 billion, along with $600 million from the European Bank for Reconstruction and Development, for the cornerstone of the remediation plan, a significantly more stable containment facility known as the New Safe Confinement (NSC) structure. Expected to be commissioned in early 2018, the arch-shaped NSC, nicknamed the “Mega Tomb,” stands 110 meters (361 feet) tall, 165 meters (541 feet) long and 257 meters (843 feet) wide, and could easily enclose the Statue of Liberty.

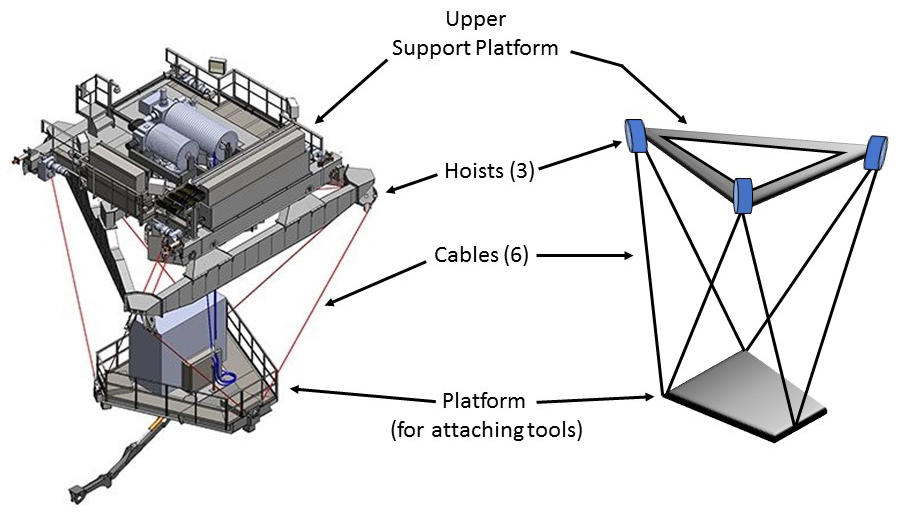
Designed to last at least a century, the shelter isolates the cleanup of the hazardous reactor area. The workhorse of the remediation effort is a computer-controlled, RoboCrane-inspired platform created by PaR Systems, a company based in Minneapolis-St. Paul, Minnesota, that licensed the NIST technology in 2010. Called TensileTruss, the platform is suspended from a bridge crane-and-trolley system that spans the entire NSC structure.
The RoboCrane design, incorporated in TensileTruss, was developed in the early 1990s by NIST engineer and robotics expert James Albus, who expanded on the principle of the Stewart platform used in aircraft flight simulators. That device uses three pairs of hydraulic jacks to move a platform with six degrees of freedom (x-, y- and z-axes, along with roll, pitch and yaw). What Albus did was turn the Stewart platform upside down, manipulating it from above using motor-driven winches rather than from below with jacks.

Because of this innovation, RoboCrane lifts five times its own weight, suspends a platform much farther than possible with hydraulics, holds loads rigidly in place even at an angle, and provides a precision-controlled base for remote operation of various attachments. For its long-term duties at Chernobyl, PaR Systems will affix a variety of interchangeable, remotely operated tools, including a robotic arm, drill, jackhammer, high-powered vacuum system and closed-circuit television system.
“The first order of business is dismantling the original sarcophagus, so the TensileTruss system will be used to sever welds, cut concrete and lift away materials for disposal,” said Rob Owen, a senior program manager at PaR Systems. “Next, the mobile platform and its attached tools, such as jackhammers and blow torches, will assist in the removal of the destroyed reactor building. Finally, our system will be highly involved in the Chernobyl remediation’s most challenging task—removal and disposal of the highly radioactive fuel debris in the reactor’s melted core.”
Did You Know...?
- Chernobyl is not the only nuclear disaster site benefitting from the RoboCrane technology. The PaR Systems TensileTruss also serves as a remotely operated, submersible platform delivering tools for the cleanup of the Fukushima Daiichi nuclear power plant in Japan damaged in a 2011 tsunami.
- RoboCrane was named by both Popular Science and Construction Equipment magazines as one of the top 100 technologies for 1992. It will be working at Chernobyl for some time; experts predict that the site will not be completely dismantled until 2065.
- James Albus, who conceived the RoboCrane technology, and British neuroscientist David Marr, together created one of the leading hypotheses on brain functioning and learning known as the Marr-Albus theory of the cerebellum.
– Michael E. Newman