
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Down-the-road (DTR) radar
Down-the-road (DTR) radar (radio detection and ranging) is the most commonly used vehicle speed measurement device in the United States. There are over 150 000 DTR radar units in use in the US, and almost every legal jurisdiction in the US accepts DTR radar for evidentiary purposes in speed enforcement cases in traffic court. Consequently, the performance of these devices must be sufficient to assure the courts’ confidence in using these devices. This assurance comes from 1) compliance to traffic enforcement device performance requirements as defined by the National Highway Traffic and Safety Administration (NHTSA) of the Department of Transportation, 2) scheduled calibration by testing labs, and 3) routine calibration by the radar operator. The STG established a new technical committee, TC 41, within the Institute of Electrical and Electronics Engineers (IEEE), to support the development of internationally-recognized documentary standards (https://ieee-ims.org/technical-committee/tc-41).
DTR radars are provided as either hand-held radar “guns” or dashboard-mounted, or similar vehicle-mounted, units. The DTR radar has three basic components, the transceiver/mixer head, the processing component, and the display/human interface component. The processing and display/human interface components are usually combined into one unit, the display head. DTR radar typically are found in one of two forms; one in which the display and transceiver/mixer head are combined into a common unit and another form in which the two heads are separate but connected by an appropriate electrical interconnect. DTR radars operate in three frequency bands, the X (10.5 GHz to 10.55 GHz), K (24.05 GHz to 24.25 GHz), and Ka (33.4 GHz to 36 GHz) bands. The DTR radar uses the Doppler effect to provide a measure of speed. A description of the Doppler effect and its application DTR radar technology may be found in Reference 1, and a general measurement set up is shown in Figure 1.
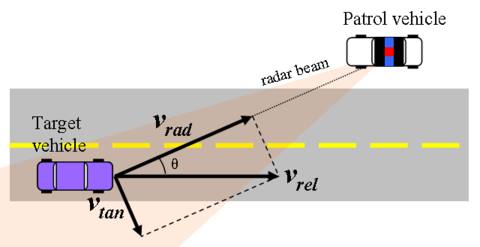
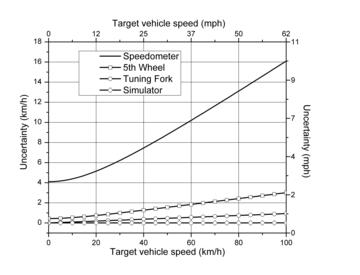
As shown in Figure 2, the calibration of the DTR radar can be performed in different ways, each providing different levels of speed measurement uncertainty, with the simulator (a hardware Doppler speed emulator) providing the lowest speed measurement uncertainties (Reference 1). Therefore, the crux of accurately measuring the performance of the DTR resides in the ability to accurately emulate the Doppler shift caused by a moving vehicle. The current methodology relies on an expensive Doppler-speed emulator that is custom built by the DTR radar manufacturers. Figure 3 shows a new low-cost simulator designed by NIST that can easily be assembled by test laboratories from commonly available microwave components and test equipment.

LINKS
- IEEE: TC-41 - Traffic Enforcement Technologies Technical Committee
- IEEE: 2450-2019 - Standard for the Performance of Down-the-Road Radar Used in Traffic Speed Measurements
- NHTSA: Dangers of Speeding
- ASTM/SEI: Down-the-Road Radar Devices Verification Program
- OIML: International Recommendations for Traffic Speed Measurement Radar
- IACP: Road Policing and Traffic Safety Programs
- Wikipedia: Radar Speed Gun
MAJOR ACCOMPLISHMENTS
Established, in 2016, technical committee within the Institute of Electrical and Electronics Engineers to develop documentary performance standards. Established DTR-radar working group and initiated development of a DTR-radar documentary standard in 2016. In 2019, the 2450-2019 - IEEE Standard for the Performance of Down-the-Road Radar Used in Traffic Speed Measurements was published.
SELECTED PUBLICATIONS
Calibration of Speed Enforcement Down-the-Road Radars
REFERENCES
[1] J. Jendzurski and N.G. Paulter, "Calibration of Speed Enforcement Down-The-Road Radars", Journal of Research of the National Institute of Standards and Technology, 2008, Vol 114, Number 3, pp 137-148 (https://nvlpubs.nist.gov/nistpubs/jres/114/3/V114.N03.A01.pdf )
CUSTOMERS/CONTRIBUTORS/COLLABORATORS
National Highway Traffic Safety Administration(link is external), Department of Transportation
International Association of Chiefs of Police
Contacts
-
(301) 975-8009