Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Taking Measure
Just a Standard Blog
Search and Rescue Robotics: A Q&A With NIST's Adam Jacoff

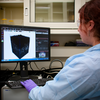
Adam Jacoff in the NIST Robot Test Facility.
Adam Jacoff has been a robotics research engineer at the National Institute of Standards and Technology (NIST) since 1988. His research has focused on developing a variety of new robotic capabilities and designing comprehensive suites of tests to foster innovation throughout the robotics community to help keep emergency responders out of harm’s way. Adam, along with the NIST Emergency Response Robotics team, is a finalist for a Samuel J. Heyman Service to America Medal in the Safety, Security and International Affairs category, which is awarded to federal employees who have made significant accomplishments in fields such as civil rights, cybersecurity, emergency preparedness and response, border security, counter-terrorism, defense and military affairs, intelligence or diplomacy. The Samuel J. Heyman Service to America Medals are intended to highlight excellence in the federal workforce and inspire other talented and dedicated individuals to go into public service.
What made you decide on a career in the federal government? What made you stay?
I originally joined NIST in 1988 as a young engineer wanting to work on prototype implementations of a robot that was expected to help build and maintain the space station. At the time, robotics in general wasn’t much of an industry, mostly research projects of various kinds. But that space-based robot, called the Flight Telerobotic Servicer, was quite an ambitious idea. One of its main jobs was to assemble truss joint mechanisms used to connect the main space station structural components. Astronaut activities outside the space station are some of the most dangerous things they do, so robotic help was important. Our NIST group was leading research in sensor-based control of robotic arms that could track and grasp objects in the environment.
My first design-and-build project at NIST was a robotic head called TRICLOPS, because it had three cameras as eyes. I designed the two verging eyes and Al Wavering, now the acting deputy director of NIST’s Engineering Laboratory, designed the center eye and neck motions. Seeing this fabricated robotic “head” come alive to track things moving through the environment was just such a visceral pleasure. To design and build something from nothing, and try to teach it to do useful things, is what robotics is all about. That TRICLOPS head is actually on display in the lobby of the NIST administration building.
The Flight Telerobotic Servicer project was canceled after a few years as the space station in general needed to cut costs. So our group’s research efforts turned toward developing robotic assembly lines for manufacturing applications. That was in NIST’s Automated Manufacturing Research Facility in the early 1990s, which helped pave the way for automated manufacturing plants you see everywhere now.
What makes NIST great, and why I stayed, is the breadth of high-tech projects going on in various industries, all focused on pushing the state of the science. I’ve had maybe five different mini-careers at NIST over the years, each lasting for five years or so, focused on different kinds of robots, interacting with different stakeholders, producing different impacts. Only my phone number and my email address have remained the same.
How did you get interested in robotics and emergency response robots specifically?
The first robot I built was for a senior design project at the University of Maryland. That was before robotics was a big thing, but it seemed like an interesting way of making mechanical engineering come alive. That robot was destined to participate in the first annual Walking Machine Decathlon. It wasn’t actually robotic at all, because it didn’t have a computer on board (they were still the size of rooms). But it was very stable with three legs always on the ground while the other three legs advanced or rotated around the center. It kind of walked slow and steady like a crab. It had to be stable because some of the decathlon tasks were to carry water on its back and deal with the shifting weight of the water sloshing around.
That was an illuminating experience, my first attempt at making something robotic. It was, and always is, both frustrating and rewarding. Like training a new puppy, but one that you designed and fabricated by hand. That walking machine took its very first steps across the starting line of the competition out in Colorado. It required two all-nighters in a hotel just prior to the competition to put the final puzzle pieces into place. It was a single semester project that clearly needed two. I designed and built the legs, which was my first time machining aluminum. That robot placed second behind a robot that attempted to climb stairs too, which ours could never do. That leg design only lifted about an inch off the ground, but it walked like a champ! I knew then I wanted to work with robots somehow after graduation, design them, build them, try to teach them to do useful things. I wanted to make robots that would keep people out of harm’s way.
How have developments in technology, such as the advances in aerial and aquatic robots, transformed search and rescue during your career?

There are lots of very dangerous tasks that can and should be performed remotely using robots of various kinds. Think about bomb squads and soldiers using remotely operated robots to disable improvised explosive devices rather than manually doing so in padded suits, which is unconscionably dangerous. There are plenty of other examples such as searching under semi-collapsed buildings, aquatic search and rescue during and after storms, and aerial firefighting scenarios in both wildland and urban environments.
So I now lead an international effort to develop standard test methods for emergency response robots including ground, aquatic and aerial systems also known as “drones.” These standard tests enable emergency responders and others to perform extremely hazardous tasks from safer standoff distances.
When we started, there was no measurement science or standards infrastructure available to objectively evaluate robotic capabilities or remote-operator proficiency. So we filled that void with easy-to-replicate standard test methods enabling any user to quantify the performance of their own robots and personnel. We now have more than 50 tests. After helping to guide purchases of robotic systems, many of the tests are used to focus training as repeatable scoring tasks in operational scenarios. The resulting scores measure and compare operators’ proficiency against anybody using the same system in the same tests. That’s how our tests support credentialing of remote operators, like a driver’s license test for very different kinds of vehicles. These licenses will enable incident commanders at large-scale disasters to use specific capabilities in otherwise unknown responders deployed from other agencies and regions.
You’ve participated in a lot of international collaborations and competitions. Tell us about RoboCupRescue. What has been its impact?
We pioneered the use of robot competitions as an effective mechanism for validating and disseminating standards worldwide, and have conducted more than 30 regional and international competitions over 20 years. They are excellent incubators for new standard tests because of the wide range of robots that participate. They also provide a forum for manufacturers and researchers to measure progress annually and highlight breakthrough capabilities in their latest inventions.
To help develop and validate the original suites of ground-robot tests, I co-founded an international robotics competition called RoboCupRescue with a colleague from Japan that was focused on urban search-and-rescue robots. The objective was to help guide research, measure progress, and educate emergency responders about the potential usefulness of emerging robotic capabilities. The theme was robots that could deploy into disasters after earthquakes, tsunamis and other extremely hazardous and difficult environments. The first competition we conducted was the year before the World Trade Center collapse, which clearly showed the need for better robotic capabilities than were available at the time.
They’ve gotten bigger and much more refined over time. So now each competition is an astonishingly productive public evaluation of the state of the science for all to see. A typical RoboCupRescue championship conducts more than 400 trials in less than a week, using more than 30 test methods in three different scales. We conduct a massively concurrent evaluation with teams proctoring other teams in repeatable trials to measure performance in individual tests and sequences of tests. The scoring paradigm encourages autonomous and assistive behaviors that improve remote operator performance. Over the years, these competitions have inspired and helped refine completely new approaches to ground robot mobility, dexterity and laser mapping within very complex environments.
These robotics competitions are literally the thing I’m most proud of in my career. The robots were pretty ineffective when we started, especially in the most difficult terrains. Our RoboCupRescue competition model has been adopted by much bigger competitions like the DARPA Robotics Challenge for Disaster Response (2012-2015), where we added specific new tests for humanoid robots, and the World Robot Summit Challenge (2018-2021) being hosted at a huge new robot test facility in Fukushima, Japan. That test facility will contain all of our ground, aquatic and aerial tests to support ongoing development.
The synergy between researchers, manufacturers and emergency responders worldwide is just extraordinary to witness when everybody is working together to conquer the same set of increasingly difficult tests. There are thousands of people each year thinking up new approaches and refining their robots to perform well in these tests. So we’re helping to guide and evaluate the cutting edge of emerging technologies, and it is really gratifying.

What’s next for you?
We’re working on developing test methods for aerial drones. I think this is going to be the most impactful thing we’ve ever done. That’s partly because of the staggering size of the market. But also because they are some of the smartest systems I get to work with, so they’re really useful for emergency responders, commercial and industrial applications, and much more. There are so many situations where remotely piloted drones can provide essential situational awareness very quickly, with really excellent images and video. They’ll keep emergency responders at safer standoff distances while improving their effectiveness. You’ll be seeing them everywhere soon.
So, to help ensure that drones get safely integrated into the national airspace, we developed a series of tests that evaluate system capabilities and remote pilot proficiency. Just as our ground-robot tests have helped guide more than $200 million in robot purchases by emergency responders and the military over the years, our drone tests are now helping to inform purchases at a much faster pace. And people see the benefits more readily now given the impacts on ground robot procurements and training.
Flying safely in our national airspace requires knowledge and skill. The Federal Aviation Administration (FAA) developed a written test that ensures remote pilots understand airspace restrictions and safety precautions. Our test methods augment that with measures of remote pilot proficiency. So emergency responders and other organizations worldwide are using our tests to focus their training and measure their proficiency to support new licensing requirements for remote pilots.
This is an extremely important new use case for our tests, especially because of the risk associated with an out-of-control drone for nearby ground personnel and possibly and other aircraft in the area.
One example is our Civil Air Patrol (CAP), which has more than 1,200 pilots across 52 sites nationwide. They’re using our tests to get all their pilots onto the same measuring stick for their credentialing process. CAP provides all the aerial needs for the Department of Homeland Security’s Federal Emergency Management Agency (FEMA). Multiple states have adopted our tests to credential their public safety organizations; Canada is next. So our tests are already having an impact on a wide variety of federal, state and local emergency responders in the U.S. and are starting to get replicated internationally.
You and the NIST Emergency Response Robotics team are finalists for this award, do you want to give a shoutout to your teammates and talk a little about the group effort?
Our project has been a truly international effort spanning twenty years with far too many emergency responders, soldiers, test facilities, manufacturers, researchers, and sponsors to list and thank. So many of them have collaborated at various times over the years on entire suites of tests. I hope they see their ideas implemented within the tests they helped shape. It’s a good feeling.
The brunt of the work has been performed by a rather small and evolving team from NIST with three to four people per year or so. We develop the tests, organize the validation exercises, the robot competitions, the standards committee meetings. We refine and refine some more until all the various user community requirements are met. It’s been an ambitious endeavor at a relentless pace because of all the various stakeholders and at-risk communities involved.
Elena Messina helped start the project. She provided technical and managerial expertise throughout as we tried to get our minds around the myriad of robots and operational requirements across all the various user groups that needed them.
Ann Virts has been the associate project leader throughout. She does a little bit of everything, keeping us focused and productive while maintaining and improving our Robotics Test Facility. She has helped so many external collaborators to replicate the tests and conduct trials at their own facilities, always providing an excellent example of a test administrator that everyone can learn from.
Kamel Saidi, Kenny Kimble, Dave Schmitt, Anthony Downs and Brian Weiss have provided technical expertise and so much effort to develop and refine the tests. They have conducted every validation exercise, competition, and standards committee meeting with a level of excellence and professionalism that inspired everyone involved. They have refined our development process and improved our data collection tools and skills to turn ground tests into aquatic tests, and then into aerial tests. Always prototyping and refining apparatuses until all our various user communities are satisfied. Developing consensus standards is not an easy venture, but they have learned to lead and follow at the same time to get everybody to agree.
We could not have done it without constant support from our management, led by Al Wavering and Kevin Jurrens in the Intelligent Systems Division, and Nelson Bryner and Jiann Yang in the Fire Research Division. Also, our exemplary administrative staff led by Beth Moylan. They have shepherded through all our purchases, travel, contracts, and various other bureaucratic necessities at a relentless pace. They have supported our closest external collaborators and helped organize our events. Yet they rarely get to meet the responders we’re helping or hear their heartfelt appreciations of our collective work, which is what kept us going.
Our main sponsors from the Department of Homeland Security, Phil Mattson and Kai-Dee Chu, saw the need for standards in this area early on and helped us fill the void. They provided essential funding over the years and so much guidance. They enabled us to work with their operational units like FEMA, Customs and Border Protection, Secret Service and other federal agencies needing to deploy robots in various ways. They ensured our project impacts benefited researchers, manufacturers, and users of all sorts, wherever robots could help people perform hazardous tasks more safely.
Finally, there are so many emergency responders and soldiers that have leaned into our project over the years and became our friends. They have been generous with their time, their skills, and most importantly, their knowledge. They make it all so gratifying because they believe in what we’re trying to accomplish. They guide our thinking, prioritize our efforts, and inspire our team every time we’re together. Their roles may be varied, but they combine into outcomes we created together that will help others in their truly heroic professions use robots to stay safe and be more effective — out of harm’s way.
Any advice for students or young researchers?
My best advice for students is simple: If you don’t yet know what drives you intellectually, you’re certainly not alone. As you explore options, it’s as important to know what you don’t want to do as it is to figure out what you do want to do. The process of elimination can be illuminating.
There are lots of shiny and frivolous options out there. Look for an endeavor that leads you into the deep end of the pool, toward something you may think is harder than you can handle. You’ll learn, and that’s the key.
Look for good people that you respect and appreciate almost innately, because they will be you someday.
And if you find something you can really lean into that has some altruistic outcomes, you’re much likelier to find gratification in your work. Money never brings that.
It’s been said that if you can make your avocation into your vocation, you'll never work a day in your life. That’s a worthy goal. But don’t expect to find it right out of the box with a bow on it. Just get on the path and refine as you go. Open each new version of yourself to the things that inspire you.
Some years down your path, sticking to it even when it’s hard, just be sure each fork in the road leads you a little closer toward your happiness. Nobody “finds” their perfect job. When you know what that job looks like, you’ll find a way to make it happen.
Read Adam's honoree announcement.
Learn more about Adam and the team's work in our news story, "NIST Performance Tests for Aerial Response Robots Become National Standard."