
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Problem
Patent Description
A novel smart target has been designed for vision-agnostic systems to acquire six-dimensional (6-D) information of a moving object (x, y, z, pitch, yaw, and roll) with high accuracy. The smart target is motorized to constantly rotate toward the measurement instrument for non-blocking dynamic measurement. This invention offers unique advantages in supporting the vision-agnostic systems to capture precise 6-D information of an object that requires precision localization in a variety of applications, including registering multiple machines/tools/objects, adaptively locating objects for unplanned adaptive control, precisely tracking the pose of an object used by robot operations, and applications in machine and robot visions. The measured 6-D information can also be used as the feedback control for motion, relative position/orientation monitoring of two items, and data registration for in-process inspection.
Below are sketches of the smart target design.
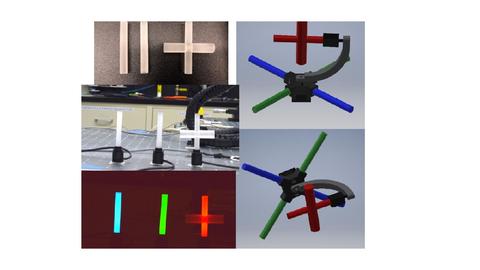
Invention
A six-dimensional smart target determines pose of an object and includes: a gimbal with an azimuthal base and an elevation arm; an elevation member on the elevation arm that has light pipes; and an azimuthal member with light pipes such that the elevation member rotates at a rotary center about an elevation axis and azimuthal axis to consistently maintain the elevation member in a field of view of a measurement instrument.
Features
High accuracy that comes from the different design concept; Non-blocking measurement design to measure both static and dynamic transmission control protocol (TCP) data; A unique definition of a coordinate frame; and A hybrid target for the cross-platform measurement system.