
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Non-contact Coordinate Measuring Machine Using a Noncontact Metrology Probe
Patent Number: 11,073,373
Problem
patent description
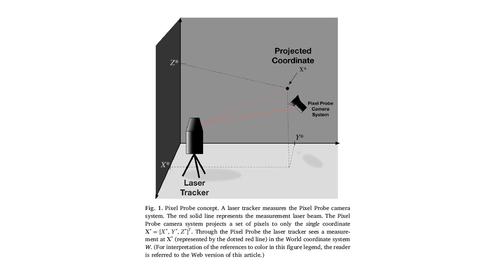
This new invention leverages Pixel Probe technology but vastly improves its usability. One can think of the new invention as a measuring machine that scans a Pixel Probe over an object to measure its spatial extent, dimensions , and at the same time links these measurements to a global coordinate system all with accuracy better than 30 microns and without contact. The new non-contact coordinate measurement machine is created from the union of a Pixel Probe, Laser Tracker or optical encoders, and a 3D motion stage. In the Pixel Probe Coordinate Measurement Machine (PiCMM) the stylus of current contact based CMMs is replaced with a Pixel Probe. The Pixel Probe acts like a virtual stylus since it projects a set of three pixels to a single point in space from a camera system. This projected pixel acts to map a point in three-dimensional space to a point in the images captured by the camera system. Instead of the deflection of a contact based stylus being recorded to determine a coordinate on an object one is trying to measure as is the case in a contact based CMM, the Pixel Probe senses the coordinate on an object one is trying to measure by projecting the point from the object onto the camera images. This camera system is attached to a motion stage that can move the cameras in X, Y, Z direction. When a user clicks on a point in the image corresponding to the coordinate to be measured the motion stage autonomously drives the Pixel Probe to it and a measurement is obtained either through a laser tracker or optical encoders (see figure 1 below).
Features
This invention solves three dimensional and six-dimensional spatial measurement challenges which arose due to a lack of available technology. The main issue was how to measure and track the location (3D) and orientation (6D) of an object that was under 5 mm in size, was comprised of sharp edges, and too delicate to touch and to do so with spatial resolution under 30 microns and to know this information inside a larger volume and world coordinate system. It is important to note the goal was to actually measure the object itself directly and not some target attached to it as some systems can already achieve. The other issue was that this small object was a part of a larger system such as an industrial robot that manipulated it. The measurement challenge was to relate the position and orientation of the small object to the motion of the large robot. That is, the measurements needed to all exist in a global coordinate system that is the position and orientation small object and as well as measurements of the motion of the robot. To solve this problem the Pixel Probe was invented.
The PiCMM benefits include
-
- non-contact coordinate measurement
- high resolution better than 25 microns in all three dimensions
- coordinate measurements linked to a laser tracker's global coordinate system and therefore coordinate measurements are absolute and not just relative
- sharp edges directly measured
- objects ranging from the meso/micro <<10mm to macro scale of > 1 m measured
- allows spatial metrology of an expanded range of objects including material objects and non-tangible objects such as images, holograms, things identified in images, etc.