
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
NIST researcher Jared Strait with a prototype hand-held KDFR
Static force, such as the weight of a person standing motionless on a bathroom scale or the force that an office full of equipment exerts on a high-rise floor, can be easily determined using scales, balances, load cells, and the like because it does not change over time. It is straightforward to calibrate such devices with an unvarying force such as gravity acting on a known mass.
Dynamic force, however, which changes continuously as it is applied – as in automobile crash testing, fatigue testing of materials, and the changing forces applied during machining -- has traditionally been difficult to measure. In many applications, a time-varying force causes large errors in instruments calibrated to measure static force. It is thus necessary to calibrate the response of these instruments to dynamic forces.
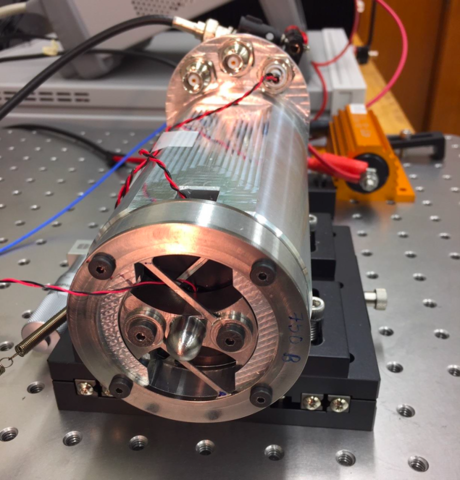
To meet that need, NIST scientists have devised the Kibble Dynamic Force Reference (KDFR), a traceable dynamic force source based on the same principle used in a Kibble balance to generate an exactly known static force to counterbalance the weight of an unknown mass.
By contrast, the patented KDFR generates waves or pulses of repeated dynamic force. “There is noise – incidental measured output that is not related to the force applied -- in any kind of dynamic measurement,” co-inventor Ako Chijioke said. “As a result, many repeated pulses are generally required to obtain a sufficient signal-to-noise ratio.”
In addition, measurements focused on behavior at specific frequencies can be challenging. These require the ability to excite the structure at the specific frequency of interest, together with an accurate measurement of the exciting force. Existing techniques do not combine these two aspects very well.
The KDFR does. It is a primary standard – that is, it does not require calibration because its operation is based on fundamental physical relations. Its targeted vibration frequency range is from a few Hz (hertz, cycles per second) up to several kHz (kilohertz, thousands of cycles per second), with uncertainty in the range of 1 %. It is portable and designed to be deployed on site wherever measurements are needed.
It is expected to be used for applications such as structural testing (including modal testing, which identifies the natural vibration modes of an object) of vehicles, buildings, and bridges as well as for calibration of force sensor systems used to measure dynamic forces, such as in materials testing (dynamic tensile testing, fatigue testing, impact testing) and in aerodynamic balances in wind tunnel tests.
Measuring vibrational resonance frequencies is important – for example, to avoid exciting them in an airplane structure that could shake itself until damaged, or as a method of measuring material elastic properties. But it is not necessary to know the force accurately in order to measure the resonant frequencies.
“Knowing the force accurately is required when you want an accurate measurement of frequency response of the structurer rather than just knowing its resonant frequencies,” Chijioke said. (Frequency response is the ratio of motion to force input as a function of frequency.).
“The KDFR could be used, for example, to determine how much of an input force a support structure would transmit to what it is supporting, to infer from measurements of strains and deformations on an aircraft surface in flight what forces were acting on the aircraft, and of course to calibrate the dynamic response of a force sensor,” he said.
Kibble Technology
The Kibble principle allows accurate determination of the mechanical force generated by a current flowing in a wire that moves in a magnetic field.
In a mass-measuring Kibble balance, accurate measurements require two steps. In one, the current is adjusted to generate a force that exactly offsets the static force exerted by an unknown mass, with the coil stationary. In a separate step, the coil is moved with no current flowing through it and the voltage generated between its ends is measured.
“Separating the current and voltage measurements into two steps requires a high degree of uniformity and stability of the magnetic field, which is difficult to achieve in a dynamic measurement,” Chijioke said. “Therefore, in the KDFR the current, voltage, and velocity are all measured simultaneously and synchronously at a rapid sampling rate (tens of kHz), providing the generated force output at each instant of time.”
Measurements of dynamic force generally do not correspond to those obtained by a statically calibrated force sensor. That difference results because of the inertia of system components that accelerate in the presence of the dynamic force, and also because of the frictional (damping) forces that moving material experiences.
Dynamic system models accounting for these effects are sometimes used to try to compensate for them. But they are generally of limited accuracy and often require measurements from additional sensors.
Accurate measurements can, however, be achieved if the sensor systems are calibrated both dynamically and, importantly, as assembled for the measurement, rather than relying on an off-site calibration of the force sensor in a standards laboratory.
Existing methods for generating known dynamic forces (for calibrations and other applications) commonly use a calibrated force sensor that detects an electrical signal such as a rise in voltage or change in resistance in response to the applied force. They are not primary devices and require periodic re-calibration.
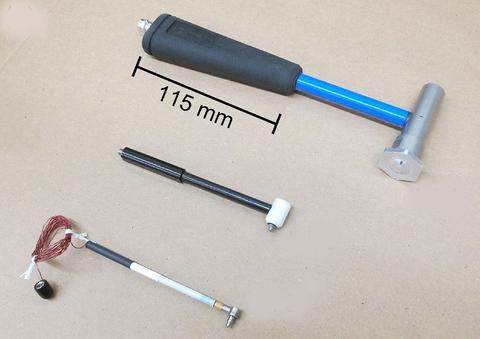
The most commonly used such secondary force standard is a so-called "impact hammer" or “impulse hammer,” which is a hand-held calibrated force sensor (typically piezoelectric, converting the applied mechanical force of the hammer strike into an electric voltage) that is struck against the target system in order to apply a pulse force.
In using impact hammers, the fact that the output force is a single pulse is a strong limitation in determining system frequency responses.
In contrast, the KDFR can be driven to produce a variety of force output wave profiles. Sinusoids and frequency sweeps (known as “chirps”) are particularly well-suited for measuring frequency response amplitude and phase with high resolution.
“Knowing the frequency response,” Chijioke said, “reveals the stiffness of structures and elastic constants of the material, its damping coefficients, the number of lumped elements or degrees of freedom needed to model the structure to a desired degree of fidelity, and the presence of nonlinear response of the structure, to name a few.”