
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Dynamic Force Contactor, Providing a Dynamic Force, and Calibrating a Force Sensor to be Traceable to the International System of Units
Patent Number: 10,641,663
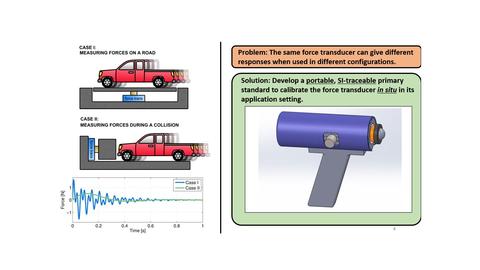
Problem
Patent Description
A longstanding and thorny problem in force metrology is that of accurately measuring rapidly changing forces. A key part of the problem is that the dynamic response of force sensors changes depending on the system in which the sensor is used, meaning that an external calibration of the sensor is often not enough. What is needed is a metrological standard that you take to a working system rather than one that sits in a calibration lab to which you send the working system. NIST has invented a portable, primary dynamic force standard for in-situ calibration of dynamic force measurement systems.
Invention
A dynamic force contactor includes: a magnet that provides a magnetic field; an electrical conductor that provides an electric field perpendicular to the magnetic field, the electric field from the electrical conductor in combination with the magnetic field from the magnet providing a Lorentzian force; an armature disposed proximate to the magnet, the electrical conductor disposed on the armature such that the armature reciprocates in a reciprocating direction relative to the magnet in response to the Lorentzian force and that produces the dynamic force; and a dynamic force mediator in communication with the electrical conductor and the armature such that: the dynamic force mediator monitors an alternating voltage across the electrical conductor; the dynamic force mediator monitors an alternating current through the electrical conductor; and the dynamic force mediator monitors a reciprocation velocity of the armature.
Features
- It accurately measures rapidly changing forces at the location point
- Variety of use: machining, robotics, fatigue testing, auto crash testing, biomechanical, aerodynamics and fracture testing