
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
2007 RoboCup Official Program

July 7-8, 2007
Technology Square Research Building
Room 113A & B
Georgia Institute of Technology
Atlanta, Georgia
Welcome to Nanosoccer!
Imagine a mechanical Pelé or David Beckham six times smaller than an amoeba playing with a "soccer ball" no wider than a human hair on a field that can fit on a grain of rice. Purely science fiction? Not anymore.
The U.S. Department of Commerce's National Institute of Standards and Technology (NIST) is hosting the first nanoscale soccer games at the 2007 RoboCup in Atlanta, Ga., on July 7-8, 2007, on the campus of the Georgia Institute of Technology.
RoboCup is an annual international competition designed to foster innovations and advances in artificial intelligence and intelligent robotics by using the game of soccer as a testing ground. NIST hopes that a competition between the smallest robots in RoboCup history will show the feasibility and accessibility of technologies for fabricating MicroElectroMechanical Systems (MEMS), tiny mechanical devices that are built onto semiconductor chips and are measured in micrometers (millionth of a meter).
The 2007 RoboCup features six competition leagues: Four-Legged, Humanoid, Middle Size, Small Size, Simulation and Rescue Robot. RoboCup and NIST are jointly organizing this year's nanosoccer competition as a demonstration event with plans for it to become the Nanogram League in 2008. Five teams are entered in the Nanogram Demonstration Competition: two from Carnegie Mellon University (Pittsburgh, Pa.), and one each from the U.S. Naval Academy (Annapolis, Md.), the Swiss Federal Institute of Technology (Zurich, Switzerland) and Simon Fraser University (Burnaby, British Columbia, Canada).
The soccer nanobots (nanoscale robots) operate under an optical microscope, are controlled by remote electronics using visual feedback and are viewed on a monitor. While they are a few tens of micrometers to a few hundred micrometers long, the robots are considered "nanoscale" because their masses range from a few nanograms to a few hundred nanograms.
To win the competition, a nanobot must be fast, agile and capable of manipulating objects. These abilities will be tested in three events: a two-millimeter dash in which each nanobot seeks the best time for a goal-to-goal sprint across the playing field; a slalom drill where the path between goals is blocked by "defenders" (polymer posts) and a ball handling drill that requires robots to "dribble" as many "nanoballs" (microdisks with the diameter of a human hair) as possible into the goal within a 3-minute period.
Nanosoccer Contestants
CMU 1
Operator: Carnegie Mellon University (Pittsburgh, Pa.)
Length: ≈300 µm
Made from silicon dioxide and aluminum, the CMU 1 nanobot responds to three different electrical wave patterns fed across the field of play directing the device to move straight, turn right or turn left. Because the nanobot is "biped" (possesses arms on either side), it can rotate in two directions.
MAGIC AND VOODOO
Operator: Carnegie Mellon University (Pittsburgh, Pa.)
Length: ≈300 µm
Manufactured from neodymium iron boride, the Magic and Voodoo nanobot is magnetized. Electromagnets are used to create a magnetic field across the field of play. The movement and speed of the robot is determined by the direction and magnitude of the magnetic wave pulse reaching it.

ETH ZURICH
Operator: Swiss Federal Institute of Technology (Zurich, Switzerland)
Length: ≈300 µm
Constructed from nickel and gold, the ETH Zurich nanobot has an actuator (a mechanism that causes a device to be turned on or off, adjusted or moved) that responds to changing magnetic fields to maneuver. The robot can be driven in forward and reverse, turn left and right, and move on surfaces other than the microchip field of play.

USNA
Operator: U.S. Naval Academy (Annapolis, Md.)
Length: ≈300 µm
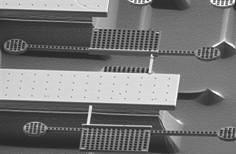
Machined from silicon and chromium, the USNA nanobot moves forward in response to an electrical waveform sent across the field of play. Turns are negotiated by touching the stylus (the wing-like tip in the foreground of the photo) to the surface of the microchip.
POLYMER MEMS PROS
Operator: Simon Fraser University (Burnaby, British Columbia, Canada)
Length: ≈250 µm
Built from a combination of polymer and metal, the Polymer MEMS Pros nanobot contains an actuator that responds to a cycling electrical pulse by moving the robot in an inchworm fashion. Three different voltages trigger different sections of the actuator to engage, thus enabling forward, left and right movement.
Nanosoccer Schedule of Events
Saturday July 7, 2007
All events take place in Room 113A&B of the Technology Square Research Building
| CMU 1 Team: | |
| 9:00-9:30 AM | Setup |
| 9:30-10:00 AM | Three runs each of 2-Millimeter Dash and Slalom Drill |
| 10:00-10:30 AM | Breakdown |
| Magic and Voodoo Team: | |
| 10:30-11:00 AM | Setup |
| 11:00-11:30 AM | Three runs each of 2-Millimeter Dash and Slalom Drill |
| 11:30 AM-Noon | Breakdown |
| ETH Zurich Team: | |
| Noon-12:30 PM | Setup |
| 12:30-1:00 PM | Three runs each of 2-Millimeter Dash and Slalom Drill |
| 1:00-1:30 PM | Breakdown |
| USNA Team: | |
| 1:30-2:00 PM | Setup |
| 2:00-2:30 PM | Three runs each of 2-Millimeter Dash and Slalom Drill |
| 2:30-3:00 PM | Breakdown |
| Polymer MEMS Pros Team: | |
| 3:00-3:30 PM | Setup |
| 3:30-4:00 PM | Three runs each of 2-Millimeter Dash and Slalom Drill |
| 4:00-4:30 PM | Breakdown |
| Sunday July 8, 2007 All events take place in Room 113A&B of the Technology Square Research Building | |
| CMU 1 Team: | |
| 9:00-9:30 AM | Setup |
| 9:30-10:00 AM | Three runs of Ball Handling Drill |
| 10:00-10:30 AM | Breakdown |
| Magic and Voodoo Team: | |
| 10:30-11:00 AM | Setup |
| 11:00-11:30 AM | Three runs of Ball Handling Drill |
| 11:30 AM-Noon | Breakdown |
| ETH Zurich Team: | |
| Noon-12:30 PM | Setup |
| 12:30-1:00 PM | Three runs of Ball Handling Drill |
| 1:00-1:30 PM | Breakdown |
| USNA Team: | |
| 1:30-2:00 PM | Setup |
| 2:00-2:30 PM | Three runs of Ball Handling Drill |
| 2:30-3:00 PM | Breakdown |
| Polymer MEMS Pros Team: | |
| 3:00-3:30 PM | Setup |
| 3:30-4:00 PM | Three runs of Ball Handling Drill |
| 4:00-4:30 PM | Breakdown |
Nanosoccer Field of Play
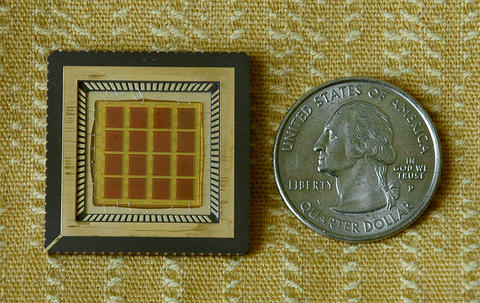
Microchip with Nanosoccer Fields of Play
The glass microchip on the left measures 3 centimeters across - slightly more than the diameter of a quarter on the right - and is divided into sixteen nanosoccer playing fields.
In nanosoccer, the action takes place atop a 3 centimeter by 3 centimeter glass microchip—actually on just 1/16th of the chip! The chip is divided into 16 square grids that are 2.5 millimeters on a side (about the size of a grain of rice). Each grid contains a nanosoccer field, 1.5 millimeters (approximately the diameter of the head of a pin) across with a 900 micrometers long by 500 micrometers wide goal on either side.
Photomicrograph of Nanosoccer Field
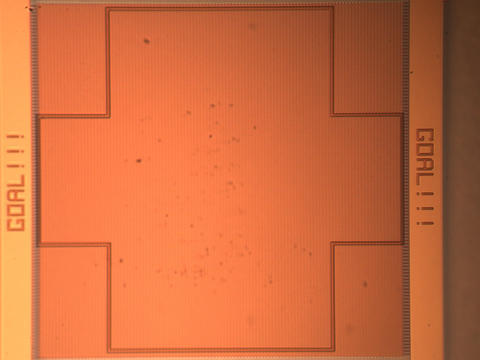
Electrodes are dispersed throughout the field of play from which the nanobots draw power and receive instructions. The boundary lines of the field are marked with a thick layer of photoresist (a film applied to the microchip) that creates a wall that the nanobots cannot cross.
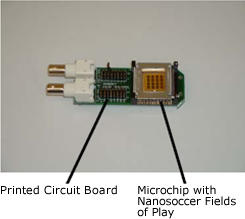
The field of play is connected to a printed circuit board (PCB) containing the control electronics. The entire unit (16 microchip fields and PCB) is placed under an optical microscope with a 4 millimeter field of view. Both of the ocular ports (eyepieces) on the scope have cameras attached; one to record and display the competition, and the other to provide visual feedback to the nanobot operators. The microscope is housed within a glove box to protect the microchip/PCB unit from humidity.
Nanosoccer Contests
For the Nanogram Demonstration Competition, the nanobots will compete in three compulsory soccer exercises: the 2 Millimeter Dash, the Slalom Drill and the Ball-Handling Drill.
In the 2 Millimeter Dash, each nanobot must sprint across the playing field from one goal to the other. The robot must begin with its entire structure behind the goal line, and it completes the dash when the first point on its structure crosses the opposing goal line. Each team will be allowed three trials. The winner is determined by the best of the three trials. The winning team will receive 5 points towards the overall competition, the second-place team will receive 3 points, and the third-place team will receive 1 point.

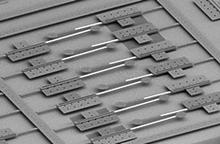
Photomicrograph of Field of Play with Defenders in Place
The nanobots must navigate around the stationary defenders to go from goal to goal.
In the Slalom Drill, the path between goals is blocked by "defenders" (polymer posts shaped like soccer players) that a nanobot must avoid as it races between the goals. Each team will be allowed three trials. The winner is determined by the best of the three trials. The winning team will receive 5 points towards the overall competition, the second-place team will receive 3 points, and the third-place team will receive 1 point.
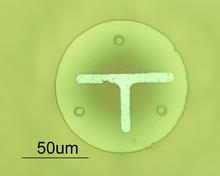
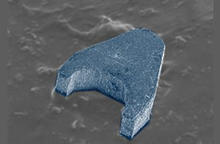
Nanosoccer Ball
This is a silicon dioxide disk (top view) about the diameter of a human hair (100 µm) that can be pushed across the Nanogram Soccer field of play by the nanosoccer robots. The "T" is a mark for spotting the ball on the field. The three circles are the location of the raised dimples on the underside of the disk that allow movement across the field.
The Ball Handling Drill requires the nanobot to "dribble" as many "nanoballs" (silicon dioxide disks) as possible into the goal within a 3-minute time period, while avoiding the same type of "defenders" used in the Slalom Drill.
The robot must begin the drill with its entire structure behind its own goal line and can only score goals in the opposing goal. A goal is scored when the entire ball is pushed past the full width of the goal line.
Each team will run three trials of the ball handling drill, with the balls and defenders placed in different locations for each trial. The team receives 1 point towards the overall competition for each goal scored. In the event of a tie, additional trials of the Ball Handling Drill will be conducted.
About NIST
From automated teller machines and atomic clocks to mammograms and semiconductors, innumerable products and services rely in some way on technology, measurement, and standards provided by the National Institute of Standards and Technology (NIST).
Founded in 1901, NIST is a non-regulatory federal agency within the U.S. Commerce Department's Technology Administration. NIST's mission is to promote U.S. innovation and industrial competitiveness by advancing measurement science, standards, and technology in ways that enhance economic security and improve our quality of life.
NIST carries out its mission in four cooperative programs:
the NIST Laboratories, conducting research that advances the nation's technology infrastructure and is needed by U.S. industry to continually improve products and services;
the Baldrige National Quality Program, which promotes performance excellence among U.S. manufacturers, service companies, educational institutions, and health care providers; conducts outreach programs and manages the annual Malcolm Baldrige National Quality Award which recognizes performance excellence and quality achievement;
the Hollings Manufacturing Extension Partnership, a nationwide network of local centers offering technical and business assistance to smaller manufacturers; and
the Advanced Technology Program, which accelerates the development of innovative technologies for broad national benefit by co-funding R&D partnerships with the private sector.
About RoboCup
RoboCup (originally called the Robot World Cup Initiative) is an international research and education initiative. Its goal is to foster artificial intelligence and robotics research by providing a standard problem where a wide range of technologies can be examined and integrated.
The concept of soccer-playing robots was first introduced in 1993. Following a two-year feasibility study, an announcement establishing an annual international conference and soccer games was made in August 1995. The first official conference and games were held in July 1997 in Nagoya, Japan. Since then, RoboCup has been in the following locations: Paris, France; Stockholm, Sweden; Melbourne, Australia; Seattle, Wash., USA; Fukuoka, Japan (in cooperation with Busan, Korea); Padua, Italy; Lisbon, Portugal; Osaka, Japan; Bremen, Germany, and now in 2007, Atlanta, Ga., USA. The events have been covered by national and international media from all over the world.
The main focus of the RoboCup activities is competitive soccer. The games are important opportunities for researchers to exchange technical information. They also serve as a great opportunity to educate and entertain the public.
The ultimate goal of RoboCup is to field by 2050 a team of fully autonomous humanoid robot soccer players that can win a soccer game against the most recent World Cup champions.