
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Today, driving intelligence resides on automated vehicles (AV). However, NIST’s Transformational Networks and Services Group Leader, Tao Zhang, offered a vision of a more distributed driving intelligence, in his presentation, “Vehicle Teleoperation: A Long-Term View,” to IEEE’s Intelligent Vehicles Symposium 2023, held this summer.
Zhang stated that teleoperations, which help operate AVs from a distance, will increasingly use artificial intelligence (AI). Presently, teleoperations involve humans either remotely operating AVs, or giving backup help if needed, with growing remote ADAS (advanced driver assistance system) capabilities enabled by AI. For example, AI-enabled ADAS may provide remote situational awareness, predicting hazards ahead and/or helping to avoid collisions. Eventually, teleoperators may become more artificially intelligent, with software taking over more remote driving capabilities.
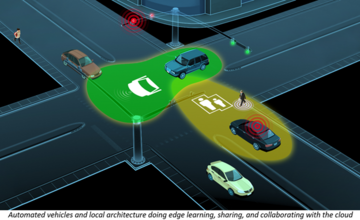
Over the long term, artificial driving intelligence could spread between AVs and remote entities, like cloud and edge computing systems, providing solutions for many challenges facing AVs. This distributed intelligence could include AVs and local network servers using edge learning – collecting and sharing information with each other and the cloud.
This automated collaboration could enable several capabilities. It could contribute to the building of AI models required to support AV operations. This distributed driving intelligence could also enable “collaborative safety,” meaning all intelligence entities would work together to protect AVs, such as at crossings and in hazardous situations. Moreover, this automated collaboration would enable continuous learning, benefiting AV operations in other ways.
Zhang also pointed out that realizing distributed intelligence depends on testing, creating a supporting architecture, developing security, standardization and more.