
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Nanosoccer Demonstration: 2008 RoboCup U.S. Open
Carnegie Science Center
Pittsburgh, Pa.
May 25-27, 2008
Nanosoccer at the 2008 RoboCup U.S. Open
Welcome to the world's most Lilliputian sporting event, the nanosoccer demonstration hosted by the U.S. Department of Commerce's National Institute of Standards and Technology (NIST) at the 2008 RoboCup U.S. Open in Pittsburgh, Pa. This is the second time that nanosoccer has been demonstrated in public; the sport debuted in July 2007 at the international RoboCup competition in Atlanta, Ga.
Two student groups-the hometown squad from Carnegie Mellon University here in Pittsburgh and the team from the U.S. Naval Academy in Annapolis, Md.-are participating in a public exhibition where miniature "soccer players"-computer-driven nanobots (nanoscale robots) six times smaller than an amoeba operating on a field the size of a grain of rice-will show off their skills.
The nanobots will be demonstrating agility, maneuverability, response to computer control and ability to move objects-all tools that future miniaturized mechanical workers will need for tasks such as microsurgery within the human body or the manufacturing of atom-sized components for microscopic electronic devices.
RoboCup is an annual international competition designed to foster innovations and advances in artificial intelligence and intelligent robotics by using the game of soccer as a testing ground. NIST's goal in coordinating competitions between the world's smallest robots is to show the feasibility and accessibility of technologies for fabricating MicroElectroMechanical Systems (MEMS), tiny mechanical devices built onto semiconductor chips and measured in micrometers (millionth of a meter).
The soccer nanobots are operated by remote control under an optical microscope. They move in response to changing magnetic fields or electrical signals transmitted across the microchip arena. Although the bots are a few tens of micrometers to a few hundred micrometers long, they are considered "nanoscale" because their masses range from a few nanograms to a few hundred nanograms. They are manufactured from materials such as aluminum, nickel, gold, silicon and chromium.
Among the nanosoccer drills being demonstrated in Pittsburgh are the two-millimeter dash in which nanobots seek fast times for a goal-to-goal sprint across the playing field; a slalom course where the path between goals is blocked by "defenders" (polymer posts); and a ball handling exercise that requires robots to move "nanoballs" (spheres with the diameter of a human hair) into the goal. The Carnegie Mellon team is conducting its runs underwater to lessen friction.
RoboCup and NIST jointly organized the upcoming U.S. Open nanosoccer demonstration as the final step toward the first official Nanogram League competition for soccer nanobots at the 2009 international RoboCup event in Austria.
Nanosoccer Players
Nanobots move in response to either electromagnetic fields or electrical waveforms. Here are examples of both types:
Carnegie Mellon University
(Pittsburgh, Pa.)
Length: ≈ 300 μm
Manufactured from neodymium iron boride, the Carnegie Mellon nanobot is magnetized.
Electromagnets are used to create a magnetic field across the field of play.
The movement and speed of the robot is determined by the direction and magnitude of the magnetic wave pulse reaching it.

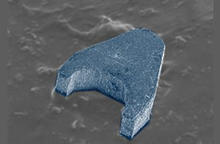
U.S. Naval Academy
(Annapolis, Md.)
Length: ≈ 300 μm
Machined from silicon and chromium, the USNA nanobot moves forward in response to an electrical waveform sent across the field of play.
Turns are negotiated by touching the stylus (the wing-like tip in the foreground of the photo) to the surface of the microchip.
Along with the robot seen here, the USNA team also is demonstrating an electromagnetically driven device at the 2008 RoboCup U.S. Open.
Nanosoccer Field of Play
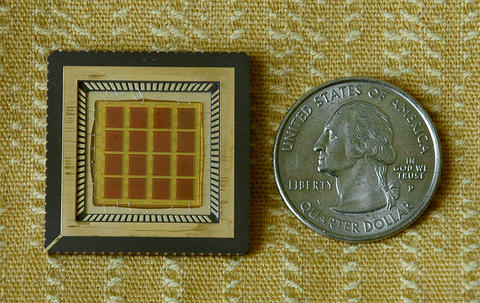
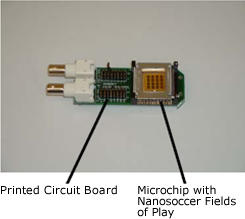
Microchip with Nanosoccer Fields of Play
The glass microchip on the left measures 3 centimeters across - slightly more than the diameter of a quarter on the right - and is divided into sixteen nanosoccer playing fields.
In nanosoccer, the action takes place atop a 3 centimeter by 3 centimer glass microchip—actually on just 1/16th of the chip! The chip is divided into 16 square grids that are 2.5 millimeters on a side (about the size of a grain of rice). Each grid contains a nanosoccer field, 1.5 millimeters (approximately the diameter of the head of a pin) across with a 900 micrometers long by 500 micrometers wide goal on either side.
Photomicrograph of Nanosoccer Field
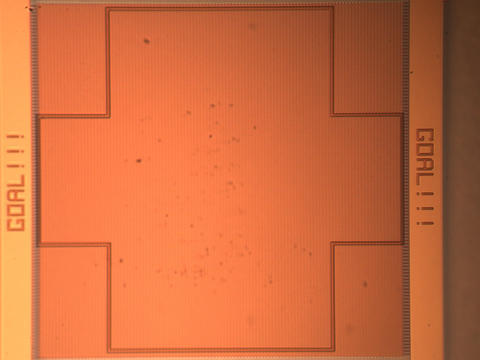
C
Electrodes are dispersed throughout the field of play from which the nanobots draw power and receive instructions. The boundary lines of the field are marked with a thick layer of photoresist (a film applied to the microchip) that creates a wall that the nanobots cannot cross.
The field of play is connected to a printed circuit board (PCB) containing the control electronics. The entire unit (16 microchip fields and PCB) is placed under an optical microscope with a 4 millimeter field of view. Both of the ocular ports (eyepieces) on the scope have caeras attached; one to record and display the competition, and the other to provide visual feedback to the nanobot operators. The microscope is housed within a glove box to protect the microchip/PCB unit from humidity.
Nanosoccer Ball
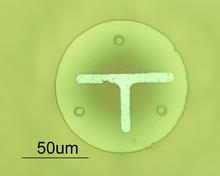
This is a silicon dioxide disk (top view) about the size of a red blood cell that can be pushed across the nanosoccer field of play by the microbots. The "T" is a mark for spotting the ball on the field. The three circles are the locations of the raised dimples on the underside of the disk that allow movement across the field.
Nanosoccer Drills
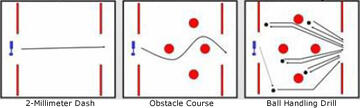
The graphic above shows the three standard competitions for soccer nanobots:
The 2-Millimeter Dash
Each nanobot must sprint across the playing field from one goal to the other. The robot must begin with its entire structure behind the goal line, and it completes the dash when the first point on its structure crosses the opposite goal line.
The Obstacle Course
The path between the goals is blocked by "defenders" (polymer posts shaped like soccer players) that a nanobot must avoid as it races between the goals.
The Ball Handling Drill
The nanobot must "dribble" as many "nanoballs" (silicon dioxide disks) as possible into the goal within a 3-minute period while avoiding the same type of defenders used in the Obstacle Course.
Nanosoccer Field with Defenders

How Small is a Nanobot?
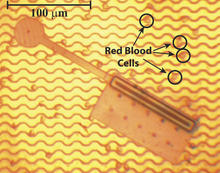
The photograph to the right shows a typical nanosoccer robot compared in size to red blood cells. About 200 of these robots could stretch in a line across the top of a plain M&M® candy.