
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
Summary
|
Our goal is to develop the scientific understanding needed to allow modeling and simulation to become the driving force in improving magnetic sensors and to implement the resulting advantages. Our approach permits industry to target its resources with greater effectiveness in developing new and improved magnetic sensors. By quantifying the improvement in sensor performance that will result from design changes or from improved materials properties, our approach reduces guesswork. |
 |
Description
|
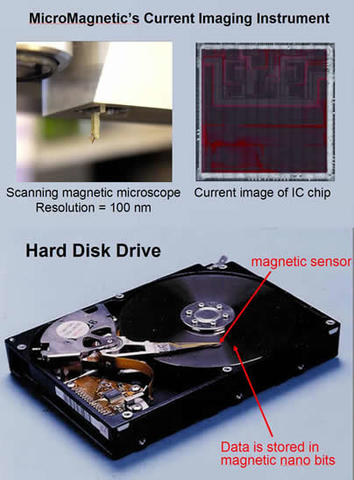
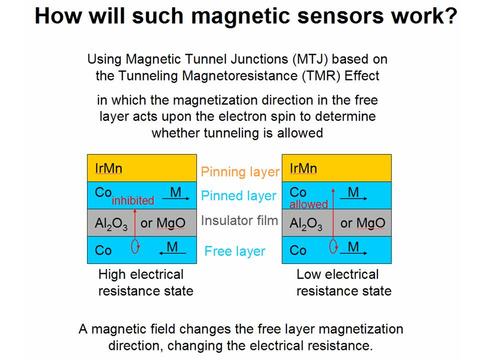
Bringing new or improved magnetic sensors to market requires modeling for rapid assessment of the effect of new designs or improved materials properties. To this end, we are investigating the fundamental properties of a new class of magnetic sensors that is rapidly displacing ones based on older technology. The new sensors are based on Magnetic Tunnel Junctions (MTJs) which use the Tunneling Magnetoresistance Effect (TMR). To optimize MTJs, NIST has purchased an instrument that diagnoses the TMR properties early in the fabrication process to maximize efficient use of time. |
 |
These instruments are not widely available, and NIST is beginning to serve as a clearing house for MTJ testing by offering diagnosis of MTJs of outside groups. The resulting collaborations with small companies, universities, and national labs are allowing NIST to lead the world in non-proprietary MTJ research. The leverage made possible by these collaborations is making the work successful beyond anything that would be possible if NIST were to operate independently in magnetic sensor research.
Major Accomplishments
Magnetic tunnel junction (MTJ) sensors are rapidly becoming the technology of choice for many magnetic sensor applications. They have the advantages of high sensitivity, small size, low cost, and low power consumption. However, so many parameters are involved in the design of today 's MTJ sensors that the complexity is bewildering. Design optimization is usually based on educated guesses. Moreover, the interaction among parameters is often nonlinear, and this increases the guess work. To improve this situation, we have begun to conduct the research needed to put MTJ sensor technology on a firm scientific foundation.
This year we formulated the master equation (below) that governs the lowest field an MTJ sensor can detect. The equation describes the essential physics of sensor performance, allowing us to vary the parameters that determine how the sensitivity depends on tunneling magnetoresistance (TMR), the size of the sensor, its power consumption, the number of MTJs arranged in a Wheatstone bridge configuration, etc.
The smallest magnetic field detectable by a sensor is set by the noise floor. We use a computer program to calculate this floor based on the equation below.
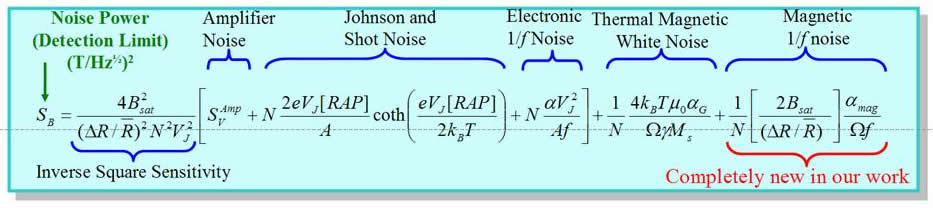
We have tested this approach using existing commercial MTJ sensors and find that it predicts performance very well. In this approach we get values for each of the different terms in the equation so we can see where problems lie and where improvements will help.
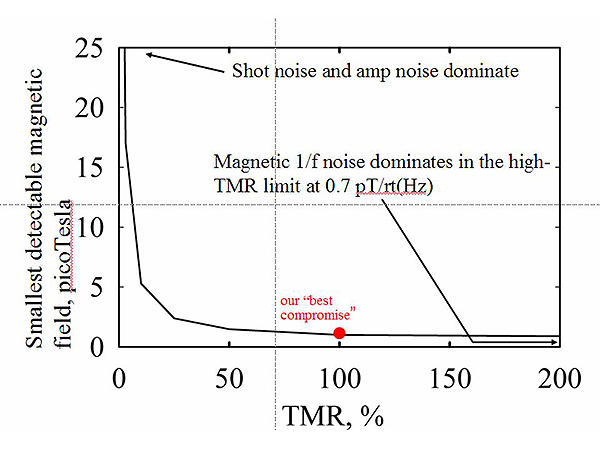
As an example, in the figure above, all parameters have been fixed at values we believe are achievable, and the result of varying the TMR is plotted. It is immediately obvious that if we want to achieve picoTesla sensitivity a TMR of ~100% is adequate. Insights like this one are very important because there are expensive R&D efforts underway worldwide to push the TMR to much higher values. The figure above indicates that for picoTesla goals such efforts are a waste of resources.
It may seem surprising, but so far no one else has formulated this equation in its complete form. Current practice is to pick whatever term in the equation is thought to be dominant in a particular sensor and use it for optimization. We have learned that this approach is inadequate. There are too many surprises in the interactions among parameters. Each term in the equation is critical for the global overview of sensor performance necessary for intelligent allocation of research resources for sensor optimization.
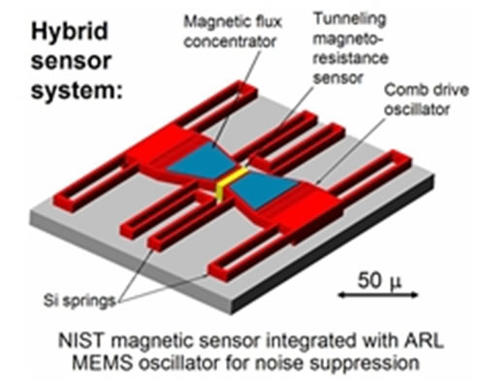
Our short term goals are to optimize the materials properties according to priorities set by the model, to integrate our TMR sensors with the Army Research Lab's MEMS oscillator illustrated at the top of the previous page, and to migrate to a Wheatstone bridge configuration. These goals will lead to the greatest sensitivity possible. Longer term goals are to transfer this technology to our customers, some of whom are listed above.
We have presented this work, as it has been developing, at the Magnetism and Magnetic Materials Conference, the International Conference on Magnetism, and the Military Sensors Symposium.
Project Summary (PDF)