
Official websites use .gov
A .gov website belongs to an official government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you’ve safely connected to the .gov website. Share sensitive information only on official, secure websites.
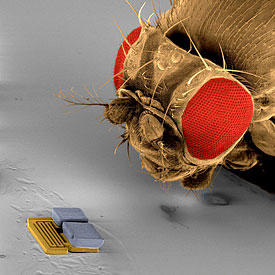
A microrobot used at the RoboCup 2009 nanosoccer competition by the team from Switzerland's ETH Zurich is compared in size to the head of a fruit fly. The robot, which is operated under a microscope, is 300 micrometers in length or slightly larger than a dust mite.
The scientists and engineers who introduced the world to tiny robots demonstrating soccer skills are creating the next level of friendly competition designed to advance microrobotics-the field devoted to the construction and operations of useful robots whose dimensions are measured in micrometers (millionths of a meter).
The Manufacturing Engineering Laboratory and the Electronics and Electrical Engineering Laboratory at the National Institute of Standards and Technology (NIST), in collaboration with IEEE, is inviting university and collegiate student teams currently engaged in microrobotic, microelectronic or MicroElectroMechanical Systems (MEMS) research to participate in the 2010 NIST Mobile Microrobotics Challenge. The competition will be held as part of the IEEE International Conference on Robotics and Automation in May 2010 in Anchorage, Alaska.
Viewed under a microscope, the microbots are operated by remote control and move in response to changing magnetic fields or electrical signals transmitted across a microchip playing field. The bots are a few tens of micrometers to a few hundred micrometers long, but their masses can be just a few nanograms (billionths of a gram). They are manufactured from materials such as aluminum, nickel, gold, silicon and chromium.
Like the NIST-coordinated "nanosoccer" events at the 2007 and 2009 RoboCup competitions (see www.nist.gov/public_affairs/calmed/nanosoccer.html), the Mobile Microrobotics Challenge will pit tiny robotic contestants against each other in three tests: (1) a two-millimeter dash in which microrobots sprint across a distance equal to the diameter of a pin head; (2) a microassembly task where the competitors must insert pegs into designated holes; and (3) a freestyle competition where each team chooses a task for its robot that emphasizes one or more abilities from among system reliability, level of autonomy, power management and task complexity.
These events are designed to "road test" agility, maneuverability, response to computer control and the ability to move objects—all skills that future industrial microbots will need for tasks such as microsurgery within the human body or the manufacture of tiny components for microscopic electronic devices.
NIST is organizing the 2010 Mobile Microrobotics Challenge with the IEEE Robotics and Automation Society. NIST's goal in coordinating competitions between the world's smallest robots is to show the feasibility and accessibility of technologies for fabricating MEMS, which are tiny mechanical devices built onto semiconductor chips. The contests also drive innovation in this new field of robotics by inspiring young scientists and engineers to become involved.
To apply for the NIST Mobile Microrobotics Challenge, teams must submit a proposal by Dec. 31, 2009, by electronic mail to microrobotics2010 [at] nist.gov (microrobotics2010[at]nist[dot]gov), or by standard mail to: NIST Microrobotics Challenge 2010, c/o Craig McGray, NIST, 100 Bureau Dr., MS 8120, Gaithersburg, MD 20899-8120. Proposals must include: a roster of individuals contributing to the team; contact information for the team leader; a list of the facilities available for fabrication, operation and characterization of microrobots; an overview of the microrobot design; an overview of the intended capabilities of the microrobot; and an overview of the fabrication process to be used.